


Игры
8 постов
8 постов
38 постов
29 постов

13 постов

34 поста

29 постов
8 постов

39 постов
6 постов
21 пост

8 постов

6 постов

24 поста

3 поста

4 поста

Итак, мне попался отечественный, увесистый, кондовый ретромодем СССР, 1990 года выпуска.
Информации по этому модему в сети крайне мало, буду признателен, если при её наличии поделитесь схемой, паспортом, описанием. А может быть, кто-то и эксплуатировал такой модем, тогда прошу рассказать. В любом случае, это еще один интересный отечественный экспонат аппаратуры передачи данных, предлагаю взглянуть.
Данный модем уже описан в следующих источниках, откуда я позаимствую некоторые интересные детали, включив их в этот очерк. Вот здесь увлечённые люди добыли знания экспериментальным путем и поделились ими, за что им спасибо — мы ими и воспользуемся.
Здесь же описано про подобный модем 1200КН-01, состоящий из двух плат.
Конечно, очень интересна эта блок-схема. Я позаимствовал ее по ссылке выше.
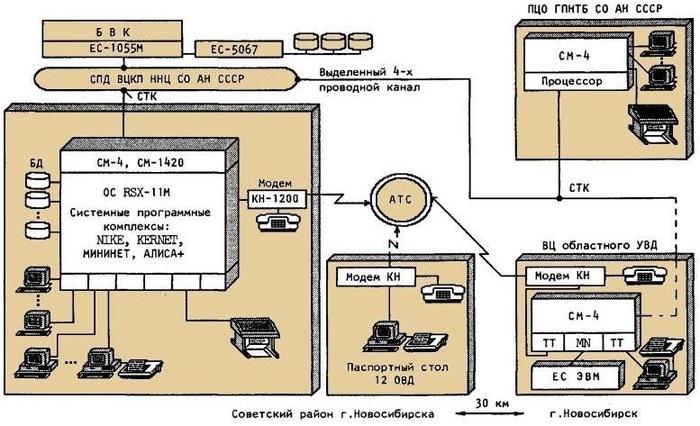
Блок-схема с упоминанием модема и программного обеспечения
В идеале хорошо бы соединить два таких модема и попробовать погонять между ними трафик, как это сделано в описании по ссылке выше. Но это, конечно, дела давно минувших дней. Мы же взглянем на него в ином, несерьезном контексте. В мультиплеер Doom под MS-DOS, конечно, не поиграешь — даже в двухстороннем полудуплексном режиме по четырем проводам, так как для этой игры требуется скорость 9600–14400 бод. А вот в сетевой PacMan сыграть было бы вполне реально. Но, увы, модем у меня только один. Поэтому я просто хотел убедиться в его работоспособности. А там, кто знает, может, попадется еще один экземпляр...
Вкратце упомянутый в справочнике «Технические средства АСУ» под редакцией Г.Б.Кезлинга модем имеет следующие характеристики:
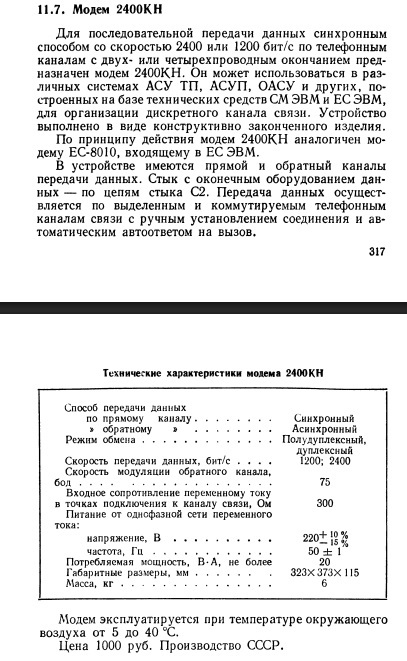
Упомянута цена в тысячу руб. Масса, как мы увидим ниже, отличается почти на 0,5 кг.
Что удалось выяснить, благодаря источникам, приведенным выше — светодиоды индикации обозначают сигналы:

106 — CTS (Clear To Send);
107 — DSR (Data Set Ready);
109 — DCD (Data Carrier Detect);
122 — Backward channel received line signal detector (Backward DCD).
Данный модем не позволяет оперировать привычными AT-командами, а также в нём отсутствует какая-либо прошивка. Взаимодействие модемов осуществляется согласно протоколу модемной связи ITU-T V.26.
Специально для эксперимента был сделан такой интерфейсный кабель. Это переходник С2 (стык 2) на COM-порт:


Для понимания габаритов приложена линейка

Почти квадратная форма

А вот и вес — зашкаливает за 5 килограмм, но не дотягивает до паспортных 6:

Если точнее — 5420 грамм
Четыре высокие резиновые ножки, которые возможно спасли это устройство от влаги, потому что на дне присутствует некоторая коррозия.
Шильдик основательно прикручен винтиками:

От экстерьера, переходим к внутрянке.
Слева мы видим трансформаторный блок питания и несложную схему преобразования с диодными мостами и конденсаторами. Надо сказать, что модем мне достался в плачевном состоянии: шнур питания был откушен, сам трансформатор оторвался и болтался в железном ящике неприкаянный, часть проводов вторичной обмотки была перекушена. Всё это пришлось вызванивать и возвращать на место. В конечном итоге функционал был восстановлен.
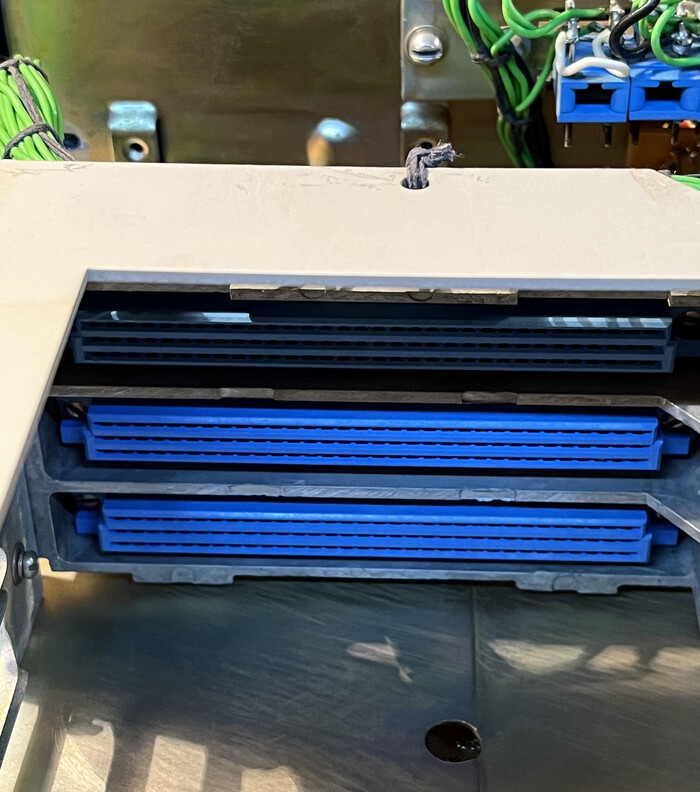
Большую правую часть занимает корзина, содержащая три платы:


Вид сзади со снятым кожухом
Под кожухом есть три скрытые кнопки, назначение которых мне неизвестно:

Три внутренние платы, объединяются разъемами СНП-59-64B-23-2:
Правая сторона корзины содержит важные для сборки устройства шильдики:
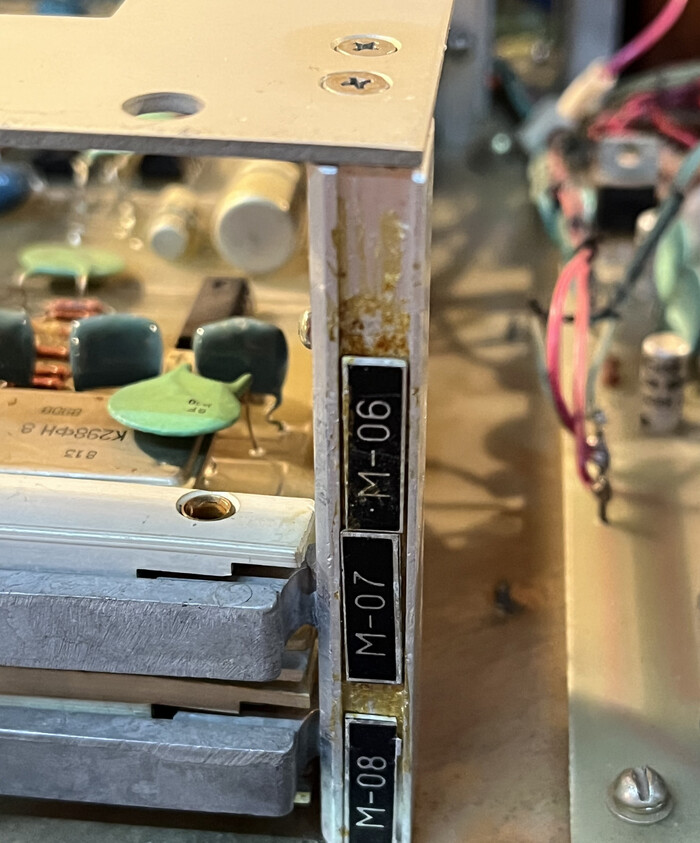
Разумеется, я не придал значения порядку установки плат в силу невнимательности и установил нижеописанные ТЭЗы (ТЭЗ — типовой элемент замены) произвольно, а не согласно однозначно прикрепленным шильдикам. Всё отмечено, но куда там — прочитать трудится не стоит. Аппаратура СССР этого не простила, и модем не реагировал на нажатия фронтальных кнопок. Когда же я воткнул платы согласно обозначениям, при нажатии кнопок стали загораться и гаснуть подтверждающие светодиоды.
Вот все три платы:


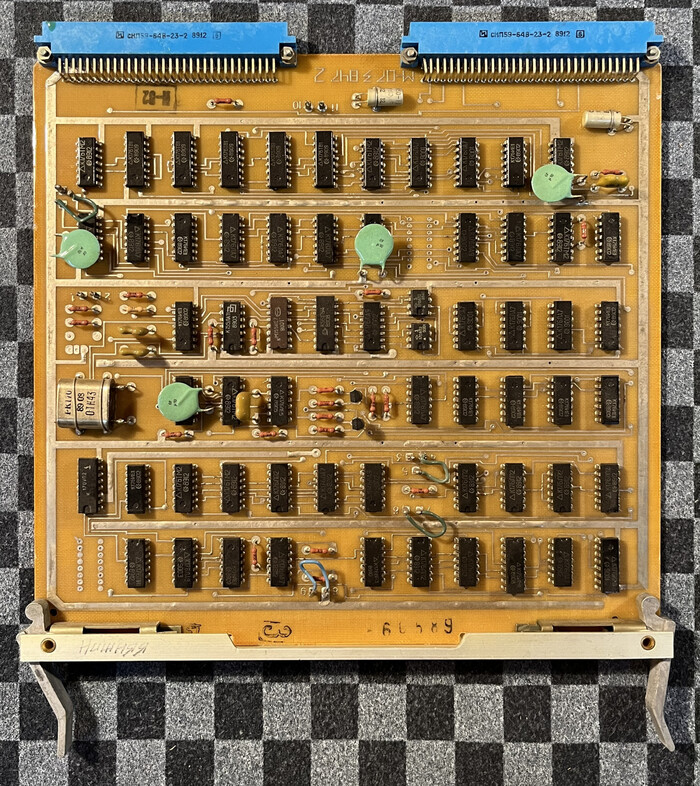
На фото фрагмента платы видно, что компоненты залиты лаком. В схемотехнику и детали я не углубляюсь, потому что схемы у меня нет, к тому же принадлежность плат хорошо обозначена в источниках вверху.

При помощи терминальной программы, посылая данные в COM-порт, попытаемся половить их на выходе в линию. Ловить выходные байты мы будем осциллографом, используя режим декодирования UART. А для пущей наглядности используем светодиодный индикатор сигналов состояния порта RS-232.
Общая схема подключения выглядит так:
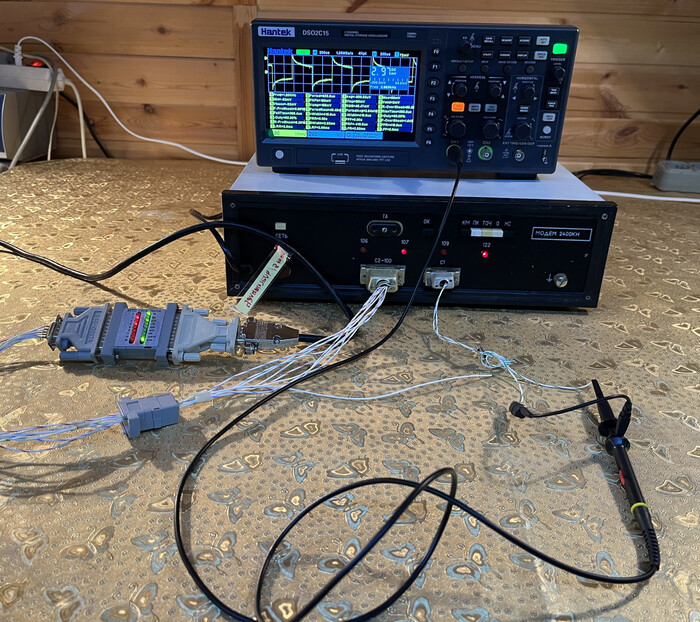
Напомню, что разъем С1 — это выход на линию связи, а С2 (Стык 2) — это разъем коммуникации с COM-портом.
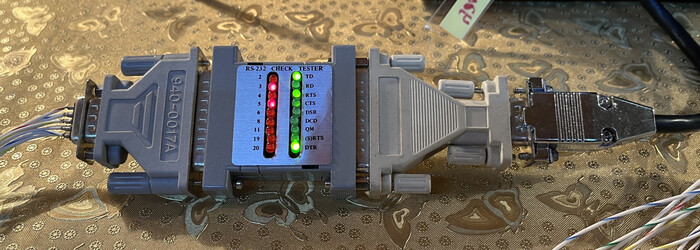
Индикатор поближе. Черный провод справа — это удлинитель COM-порта, идёт к компьютеру
Не отходя от правила «лучше один раз увидеть» (в данном случае видео), предлагаю взглянуть.
А здесь виден факт передачи байта, подтверждающий работоспособность модема. Суть в следующем: направляя при помощи терминальной программы символ «1» непосредственно в COM-порт, получаем его на выходе в линию в шестнадцатеричной системе как «0x31», согласно стандартной кодировке ASCII. Взгляните, пожалуйста.
У меня есть US Robotics 14400 Sportster (на сленге — «шпрот»), и можно было бы попробовать соединить эти модемы. Нейронная сеть отвергла эту идею на корню, однозначно ответив: «нет». «Ты можешь сопрячь эти модемы физически, но для реализации протокола ITU-T V.26 найди модем постарше». Я так понял, подобный тому, что мы рассмотрели выше.
Привожу вопрос:

И ответ:
Подводя итог, спрошу: можно ли каким-то образом еще задействовать этот модем по его прямому или, может быть, косвенному назначению? Что значит «косвенному»? Да я просто слышал, как через модем оцифровывали магнитофонные кассеты, но, к сожалению, не уловил сути — как именно, только вектор действия. Вопрос, разумеется, в контексте ретротематики; я далёк от мысли применения dial-up в современных условиях. Если вы ставили эксперименты подобного рода, расскажите, с удовольствием почитаю.
Спасибо за уделенное время!
Автор текста: MechNIX
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале
Читайте также:
Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525

А вы тоже как-то упустили момент, что китайские портативки из стрёмных клонов PSP превратились в полноценный игровой сегмент со своими звёздами, мидл-сегментом и аутсайдерами?
Нет, не упустили и ждете лучшее предложение, которое закроет все потребности дотошного геймера? Не нужно ждать. Уже сейчас среди всей этой огромной кучи всяких «анберников» есть целых три устройства, которые точечно и метко закрывают самые большие ожидания.

Обычно в этом сегменте все говорят про Anbernic, Miyoo или какой-нибудь R36s. И у каждой компании в целом есть достойное устройство на этот сегмент. Но мы предлагаем кое-что интереснее. За ценник от 4 до 6 тысяч рублей можно взять Trimui Brick.
Это похожая на классический Game Boy портативка в вертикальном формате, на базе бюджетного процессора Allwinner A113P, которого хватит на самом деле на больше, чем вы думаете.

Дизайн без излишеств — как будто некст-ген версия «геймбоя», без уродливых стиков внизу. А еще тут прекрасный комплект, в том числе с дополнительными кнопками, и приятный глазу IPS-экран с хорошей плотностью пикселей — всё ретро будет выглядеть прекрасно. Цена варьируется от 4 до 6 тысяч рублей, флешка с играми в комплекте, формат «включил и играй».
Во что можно поиграть с кайфом на Trimui Brick: NES, SNES, Sega Mega Drive, Game Boy/Color/Advance, PS1.

Куда смотреть в качестве альтернативы: самый интересный вариант это Mangmi Air X с Android и чипом Snapdragon 662 на борту. Она и на PSP максимально дизайном похожа и игры оттуда тоже запустит. Но цена дороже, до 10 тысяч рублей.

Для начала сразу поставим всё на свои места. Да, 25–28 тысяч за RP6 — это и правда очень смешные деньги, и вот почему.
Компания Retroid уже давно предлагает максимум возможностей за как можно меньший ценник. И вот в 6-ой версии своего главного продукта мы получаем: мощный процессор Snapdragon 8 Gen 2 и изумительный 120-герцовый AMOLED-экран — всё это в корпусе, который по-настоящему заслуживает название «карманный». И, кстати, никакого троттлинга — у консоли полностью активное охлаждение с радиатором и кулером.

Удобства ради, консоль есть в двух вариантах: классическая версия, где оба стика находятся на одном уровне (под DualShock, если проще), или же ассиметричный вариант для тех, кто больше любит контроллеры от Xbox и Nintendo. Стики с холл-эффектом (а значит, прощай, дрифт), а курки аналоговые и понимают степень нажатия.
Казалось бы, что можно за эти деньги купить модифицированный Switch и получить примерно то же самое? Нет, нельзя.

Потому что RP6 умеет гораздо больше, чем Switch: запуск всех ретро-консолей, PS1 в х3-х4 разрешении с шейдерами на графику, PS2/Dreamcast/GameCube/Wii/Wii U в разрешении х2 без просадок FPS, а еще PSP/DS/PS Vita/3DS/Switch, игры с Android (даже самые тяжелые) и главное — игры с ПК через GameHub или Winlator нативно, а не через облако с поддержкой загрузки из библиотеки Steam или внешних источников. Работает множество проектов до 2020-21 года, а инди так и вообще самые актуальные.
Вот именно поэтому Retroid Pocket 6 за свои деньги — это главная консоль рынка прямо сейчас, которую стоит купить любому, кто любит игры.

В принципе, на RP6 разговор о том, какую портативку купить, можно было бы и закончить, если бы не один факт: у нее в стоковой комплектации всего один экран, и второй придется докупать. Зачем это нужно? Ну, во-первых, для сохранения, презервации и запуска игр с Nintendo DS и 3DS. А во-вторых, на второй экран можно выводить всякую саппорт-информацию по играм, например карту или видео с котиками.
И с самого начала хайпа китайского портатива ходили аккуратные разговоры о том, что стоило бы брать не только формат PSP и Game Boy, но и посмотреть в сторону двух экранов. Само собой, ответ нашелся у компании AYA и GPD, но это решения на Windows за очень большие деньги.

Так вот, Ayn Thor. Стартовая цена на девайс 39 тысяч рублей, по железу всё почти как у RP6, то есть мощный Snapdragon, быстрая память и качественный AMOLED 120 Гц. Только вот их ДВА.
Компания в первую очередь позиционирует девайс как решение для самой комфортной эмуляции консолей с двумя экранами — Nintendo DS, 3DS, Wii U, и да, сейчас это лучший способ играть в эксклюзивные хиты с этих приставок. Да, может показаться, что дорого, но та же 3DS сейчас стоит под 20-30 тысяч, и найти ее в хорошем состоянии — тот еще квест.

Помимо этого, Thor с удовольствием запустит… да всё остальное в отличном разрешении с тяжелыми шейдерами, а на втором экране можете включить смешные нарезки из тик-тока, чтобы скучно не было. В сети периодически вирусится видео, как человек проходит «Зельду» с Nintendo Switch, а на втором экране держит интерактивную карту местности.
На данный момент Ayn Thor — это пиковая точка развития индустрии китайских портативок, и мы правда не знаем, что можно придумать еще лучше.
Самый частый и глупый аргумент в разговоре про китайский портатив — это мысль, что та же PSP всё запустит и больше не надо. Технически да, запустит. Но на каком экране?
На устаревшем TFT, который слепнет даже в слегка освещенном помещении, с родными лагами фреймрейта и плохим откликом. Про эмуляторы так вообще лучше промолчать — они там старые и еле ворочаются в большинстве случаев.

Да и Switch все потребности, кроме запуска своих собственных игр, не закроет, на нем с эмуляцией той же PS2 одни проблемы, главная из которых — ее отсутствие.
Индустрия сейчас дает лучшее решение для презервации классики и сохранения истории игровой индустрии в лучшем виде, и очень странно проходить мимо таких штук, если вы считаете себя увлеченным геймером.
Ведь… считаете же?
Написано при поддержке Timeweb Cloud↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале

Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525

Голова Т-800
Немногим более года назад, наткнувшись на статью про шахматные доски, я вспомнил о своём старом проекте антропоморфного шахматного робота и было взялся за текст, но спустя пару недель у меня родилась дочь, и работа снова остановилась.
Сам проект растянулся на долгое время и оказался, в целом, не слишком удачным (хотя и был доведён до условно рабочего состояния). Из-за длительных перерывов как минимум один раз мне пришлось переписывать код практически с нуля – я уже не мог понять, как именно он работает и, главное, почему не работает. В итоге проект всё же был доведён до логического завершения и функционирующего прототипа, но по ряду причин я считаю его практически провальным – о них я расскажу в конце статьи.
Задумал его очень давно, в 2015 году. Я вернулся в нашу лабораторию инновационной ерунды (я никогда не помнил этого длинного и, по сути, ни о чём не говорящего названия) со стажировки в Испании и мой научный руководитель загорелся идеей построить что-то красивое, что могло бы служить интересной демонстрацией технологий для студентов. По крайней мере, мне так помнится, возможно, цель была другая. В любом случае, он хотел построить автоматизированную машину для готовки бургеров, в которой процесс готовки был бы наглядно показан человеку, ожидающему этот самый бургер. Мне эта идея не понравилась по многим причинам. Во-первых, это не особенно интересно. Интересно будет только когда ты видишь это в первый раз, следующий бургер уже будет заказан только ради бургера. Во-вторых, это будет сопряжено с огромным количеством непредвиденных технических сложностей, ведь наш творческий коллектив по специальности были инженеры автомобильного транспорта, а не пищевой промышленности. И, в-третьих, проблемы с различными разрешениями, типа санэпидемстанции, для такой установки виделись мне весьма туманными. А кроме того, эту штуку ещё нужно было кому-то обслуживать. В общем, затея в моих глазах была сомнительной. Пока мы раздумывали и открещивались, у меня родилась идея о создании робота, который бы мог играть с человеком в шахматы, физически переставляя фигуры. Однако и эта идея тогда не имела ни четкой формы, ни конкретного плана по воплощению, поэтому я её руководству не озвучил.
Однако, я продолжал над этим размышлять. Мне вспомнились примеры из истории, а именно фальшивые роботы типа «турка», в котором на самом деле помещался человек. Понемногу в голове сложился образ: хочу антропоморфного робота, у которого был бы торс и как минимум одна рука для передвижения фигур, ну и голова, само собой, чтобы созерцать поле и сверлить взглядом противника.

Реконструкция турка. Картинка из Википедии
В какой-то момент возникла мысль, что робот может быть терминатором модели Т-800, которого после победы человечества перепрограммировали под эту задачу. Думаю, что вполне очевидно, почему я назвал проект Чесстером – просто потому, что это слияние двух слов chess и terminator.
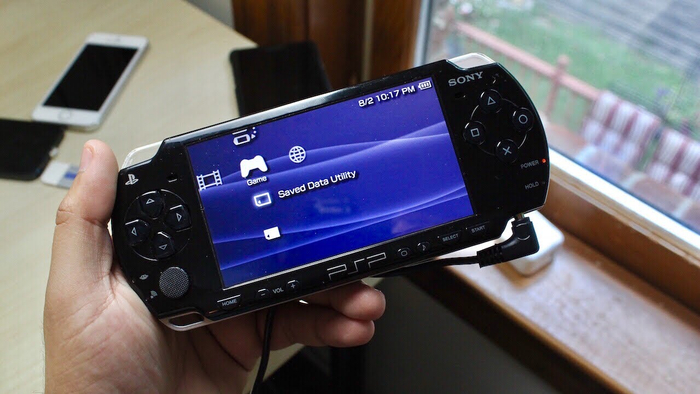
Потом из Севастополя я уехал в Испанию делать PhD. Свободное время у меня было, а также был 3д принтер, который я собрал дома специально для перевозки в самолёте.
Принтер из спичек и жигулей (старые клапанные втулки использованы в качестве подшипников скольжения – ещё походят)
Вернулся к моей задумке, когда стал изучать Python по роду своей основной деятельности. Тогда я интереса ради забил в поиск, есть ли библиотеки, посвященные шахматам, и нашел python-chess. После изучения этой библиотеки, кирпичики начали складываться во что-то толковое. Теперь стало более-менее понятно, чего я хочу и как это воплотить. За механику я особенно не волновался (и как показала практика, напрасно), а вот программная часть вызывала большие опасения. И я начал постепенно собирать робота, не имея полного представления каким он должен получиться и как должен работать. Это была одна из моих первых ошибок, но, с другой стороны, собирая конструкцию практически из мусора, который у меня набирался тоже не сразу (различные моторы были набраны в основном из принтеров и сканеров с помоек), избежать этого пути было сложно.
Начал я с головы, т.к. масштаб, по сути, её и определялся. Принтер имеет очень маленькую рабочую зону, всего 120х120 мм и, чтобы не сильно заморачиваться с разрезанием и последующей сборкой головы из огромного количества частей (в итоге собирал из четырёх), я решил сделать робота немного меньше настоящего Шварцнегера. В сети я нашёл несколько 3д моделей черепа Т-800, но ни одна из них не подходила для моих целей на 100%. Пришлось осваивать Meshmixer и немного Blender, чтобы дорабатывать модели в соответствии с моими представлениями. Во-первых, голова должна была «говорить», то есть открывать рот в такт речи. По идее, робот должен был отпускать комментарии по ходу игры, спрашивать, не знаете ли вы, где живёт Сара Конор, он же хочет отправить открытку, честно. Функционал разговора я пытался опробовать, но делал это очень примитивно (я вообще тогда не очень сильно разбирался ни в электронике, ни в программировании): Ардуина слушала звуковой выход компа и открывала рот робота, когда уровень сигнала превышал определённый порог. Это была довольно глупая затея, так как очевидно, что робот будет открывать рот как минимум с запаздыванием, обусловленным временем реакции сервы. Я думал как бы можно было организовать задержку, но так толком и не придумал, и этот функционал остался не реализованным.
Ещё хотелось, чтобы робот мог вращать глазами. Эта задумка родилась после пересмотра первого терминатора, проведенного для освежения памяти. В самом конце есть сцена, когда Т-800 заходит внутрь завода и пытается понять, прислушиваясь, где прячется Сара. В этот момент он медленно переводит взгляд с одного места на другое и это очень выразительно смотрится. Я хотел того же эффекта, плюс он мог бы смотреть противнику в глаза во время игры, что должно было бы оказывать некоторое психологическое давление.

Видна пастезахлопывающая пружина, и, немного в глубине, заметно как там чёрненькое белеется – это серва, открывающая рот. Это слева. Справа – неправильный прикус
По поводу привода глаз моя первая идея была, в некотором роде, вдохновлена реальными человеческими глазами, только вместо мышц, глаза должны были приводиться в движение тросиками от сервоприводов. Я считал, что будет достаточно 4 тросика и два сервопривода на глаз. Однако собрав прототип, оказалось, что двигать глазом можно, а вот точное положение задавать не получается, по крайней мере с теми материалами и устройствами, что были в моем распоряжении. Делать терминатора со взглядом сиамского кота как-то не хотелось, поэтому пришлось искать другое решение. Далее мне подумалось, что управлять глазами можно только с двумя сервами, не разделяя управление каждый глазом. В этом случае робот не мог бы «фокусировать» взгляд, а смотрел бы на две тысячи ярдов, в прочем ему можно, у него ПТСД. Но даже это решение я в результате воплощать не стал, так как визуальные эффекты было решено оставить на закуску и сначала реализовать боевой функционал, а потом, увы, и вовсе было решено избавиться от этого проекта.
Дальнейший рост робота был довольно странным – из головы вырос позвоночник, который упирался в основание. В качестве этого основания была взята металлическая пластина от подставки старого условно плоского телевизора. Телевизор был весьма массивный и пластина была соответствующей. Кроме того, своей формой она очень хорошо подходила. В качестве опоры плечевого пояса была взята банка от чипсов «Принглс». Она была вклеена в позвоночник для чего в оном был сделан вырез по диаметру банки.
Также робот должен был наклонять голову вниз и вверх, переводя таким образом взгляд с шахматной доски на противника. Для этого в позвоночнике, в районе третьего – четвертого шейного позвонка, был размещен шарнир, а на спине, в уже упомянутой банке, жили две сервы, которые тянули голову вверх. Дешёвые MG90S в определенных положениях со своими задачами не справлялись, поэтому сильно наклонять голову было нельзя. Увы, и эту задумку я не реализовал и привод подъёма головы не был подключен к управляющей плате.

Видно уже упомянутое основание, банку от чипсов, а также левый и кусочек от правого тяжа, ведущих от спинных серв
Постепенно я сделал торс и начал работать над рукой. Так как бандит был одноруким, я решил поместить актуатор, поднимающий руку, в левом плече, пропустив вал, на котором сидела рука через плечи насквозь. Так было удобнее, и нагрузка распределялась лучше. Кроме вала, через плечи проходили и две шпильки М3, стягивающие фланцы с подшипниками, в которых вращался вал привода плеча. К левому фланцу и был прикреплен актуатор. Чтобы он не проворачивался вместе с фланцем, внизу была организована дополнительная опора в виде треугольника из двух стержней, которые соединяли фланец с основанием робота. Под правый фланец была сделана аналогичная опора, в основном, чтобы его разгрузить. Дело в том, что кроме нагрузки от руки, на правое плечо приходилась также нагрузка от противовеса, который был призван облегчить нагрузку на актуатор подъёма руки, когда та полностью выпрямлена и перпендикулярна линии плеч. Противовес был козырный – из нержавеющей стали, чушка, извлеченная из отходов цеха, на которой экспериментировали со сваркой (на самом деле там какой-то ЧПУ станок что-то наваривает, что за технология – не знаю). На роботе он сначала просто висел, а потом был помещен в короб, чтобы не болтался при перемещении робота, да и просто на всякий случай.
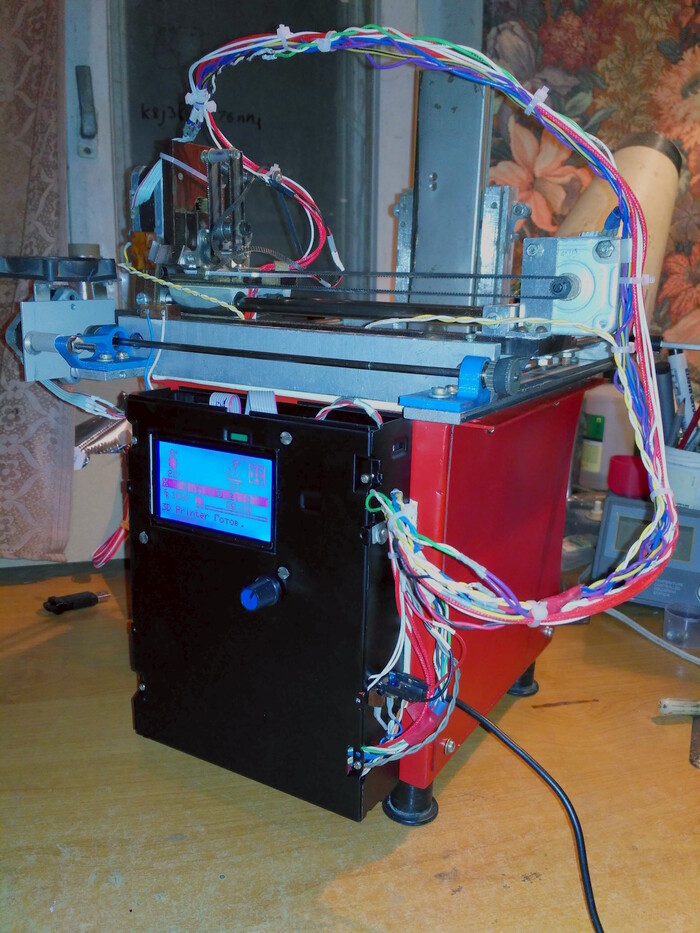
Хотя я немного забежал вперед. На самом деле, перед установкой каких-либо работающих приводов на руку, я был занят шахматной доской. Доска – это важно, так как робот не мог играть с чем угодно. Дело в том, что из-за слабости моих навыков программирования, я решил не лезть в компьютерное зрение и делать систему как можно проще. А как сделать так, чтобы робот играл вслепую? Я решил, что необходимо чтобы доска была активной и могла сообщать компьютеру своё состояние. Я уверен, что есть огромное количество различных вариантов реализации этой задачи, но я выбрал самый примитивный – матричную клавиатуру. В результате компьютер получал матрицу 8х8 состоящую из 0 (клетка пуста) и 1 (клетка занята). Зная изначальное положение фигур, можно довольно легко отслеживать прогресс партии.
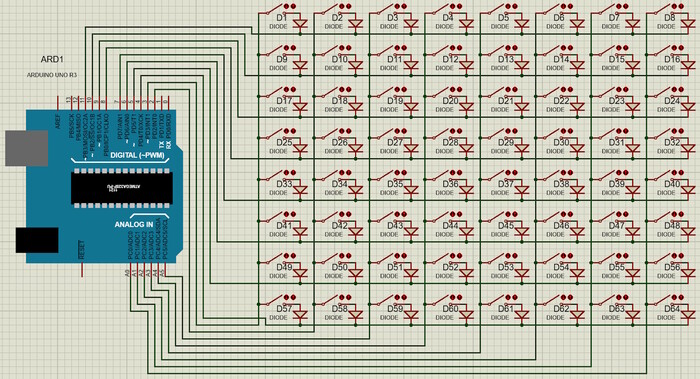
Схема матричной клавиатуры. Диоды позволяют занимать одновременно любое количество полей. Единственное, что в реальности я использовал Nano, а не Uno, но это одно и то же в плане контроллера
Хорошо, а практическая реализация? Тут я подумал, что робот, собранный из мусора, скорее всего, особой точностью похвастаться не сможет. Значит, надо сделать такую доску, чтобы можно было гарантированно точно поставить фигуру. Для этого, я решил сделать основание фигур конусным. Таким образом, когда робот фигуру отпускает, она автоматически самоустанавливается при падении. Это дало пространство для ошибки примерно ±1 см. Ладно, а как доска вообще должна работать? Не кнопки же туда действительно ставить? Да, не кнопки. В самом низу каждой фигуры я поместил небольшой круглый магнит 10×2 мм, а в ячейках доски стояли герконы. Как видно из схемы выше, всё это подключалось к Ардуино и в принципе могло вполне быть протестировано отдельно от остального робота, что было удобно. Да, кстати, я использовал ROS (Robot Operating System) для связи разных частей робота – было очень удобно в плане коммуникации.

Доска: слева первый вариант с довольно тупыми конусами, которые себя не оправдали, справа – окончательный вариант с напаянными поверх основы более острыми конусами. У фигур тоже конус имел обе части – тупую и острую
Хотя я и говорил раньше про основание робота, на самом деле, это было скорее основание торса. Мне нужно было что-то, что бы объединяло доску и торс. Для этого я купил старую подставку на колёсах от ЭЛТ-телевизора. У этой штуки было два разных уровня (вероятно, один из них для видеомагнитофона), что мне отлично подходило. Самый верхний уровень я отвёл под доску, а вот на уровень пониже прикрепил деревянный ящик, внутрь которого должен был встать управляющий комп (не судьба), а сверху я поставил торс робота.

Робот на теле подставке. Ящика пока ещё нет, торс стоит на компе, который должен был управлять системой
Но это было позже, а до этого я продолжил работу над рукой. Желая, чтобы она была максимально похожей на оригинал, я повторял хотя бы примерно пропорции и форму, что налагало некоторые ограничения. Например, плечевая кость была сильно больше размеров поля моего принтера, и ее пришлось «сваривать» из многих частей. С этой самой костью произошёл забавный, но неприятный случай. Как-то раз я разобрал руку и сняв её с робота, оставил на столе. Жаркое испанское солнце нагрело черный пластик, и когда я вернулся к работе, оказалось, что плечо имеет уже совсем не ту форму, которую я задумывал. Пришлось греть феном и исправлять.
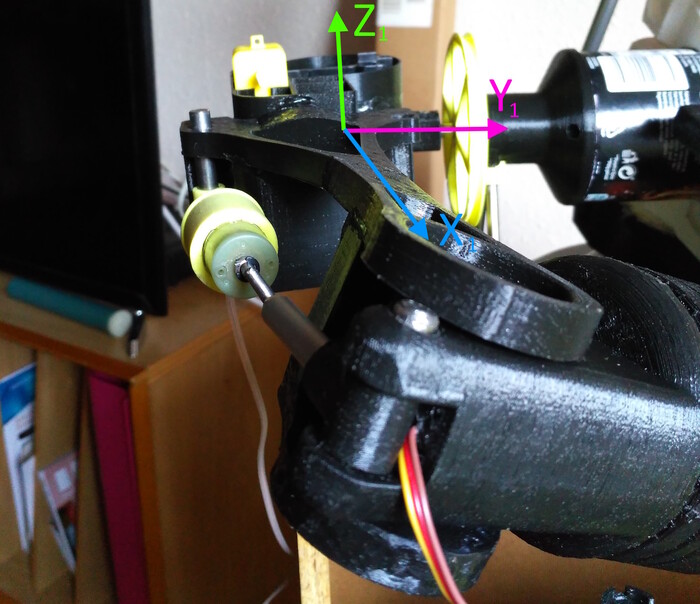
Пострадавшая деталь. PLA, ну фу таким быть! А ещё я поместил сюда подвижную систему координат X1Y1Z1, чтобы лучше объяснить актуацию руки
Чтобы сымитировать плечевой сустав достаточно, чтобы в нём было 2 степени свободы, про один актуатор (подъём руки над доской), я сказал. Он вращает сустав вокруг оси Y1. Второй расположен непосредственно в плече, он поворачивает руку вокруг Z1. Испанское солнце поворачивает руку вокруг X1. Далее на плечевой кости располагаются «бицепс» и «трицепс», как у настоящего Т-800. Активным из них является «трицепс», он и разгибает, и сгибает руку в локте. Впрочем, «бицепс» не является только лишь муляжом – в нём установлена пружина, которая компенсирует люфты механизма.

Мускулатура «киборга-убийцы»
Пойдём дальше по руке. За локтем у нас идёт предплечье, где в самом основании расположен следующий актуатор, поворачивающий руку в запястье. Это уже знакомая нам серва MG90S. Разумеется, непосредственно на неё нельзя повесить всё предплечье – она чрезвычайно хилая, поэтому конструкция вращается вокруг оси (видимой на картинке выше), посаженная на пару подшипников. В такой конфигурации серве хватает мощи, чтобы вращать предплечье/запястье. А дальше… актуаторов нет. Ну, вернее, почти нет. Дальше у меня стоял только актуатор захвата, но на кинематику руки он не влиял. Меня спросят – а как же это будет работать с четырьмя степенями свободы, если в человеческой (и, я подозреваю, что в терминаторской тоже) руке их аж семь, не считая пальцев?! А фигово это будет работать. Но будет. Зато примитивно просто в управлении и конструкции.
Что же до захвата, то сначала я не очень представлял как его осуществить, думал делать хотя бы один реально двигающийся палец. Но такая система точно бы не отличалась стабильностью, и на выручку пришли магниты. Наверху каждой фигуры вклеивался маленький магнит, что-то вроде 3×6 мм, а в полом большом пальце робота ходил вверх-вниз магнит помощнее, 6×20 мм, который мог стабильно удерживать в воздухе любую фигуру. Как происходило расцепление, если магнит был постоянным? Его просто втягивала тросиком внутрь пальца ещё одна серва MG90S, расположенная в районе локтя.
Тут я понял, что мои фигуры придётся переделывать. Во-первых, я их уже напечатал без пазов под магниты. А во-вторых, когда я начал проводить первые эксперименты с подъёмом руки, я понял, что часть моих фигур – слишком высокие и робот просто не сможет поднять их достаточно высоко, чтобы перенести через другие фигуры на поле или наоборот – не сможет перенести другие фигуры через них. Я имею в виду всё, что выше пешки. Да и пешки можно было уменьшить. В результате под замену пошло всё, кроме коней, им я просто отрезал верхушку (которой у них, кстати, и не должно было быть – её я присобачил туда для механического захвата) и вклеил магнит. Таким образом, я сделал фигуры трёх разных высот: самые мелкие – пешки, чуть выше – ладьи, кони и слоны, а самые высокие, естественно – ферзь и король. Разница в высоте, правда, была незначительной – около 5 мм между каждой ступенью.

Фигуры: слева – было, справа – стало
Изменения так же коснулись и расположения доски. Оказалось, что рабочая зона робота меньше, чем доска. Ну, я ж дурной и вообще никаких прикидок не делал. Но выход я нашёл – поставил доску на две мебельные линейные направляющие и стал двигать её в зависимости от того, где находится нужная клетка. Доска имела всего два положения – ближнее и дальнее, и управлялась связкой из Atmega8 и ULN2003. Контроллер принимал на вход 0 или 1 и переводил доску в нужную позицию.
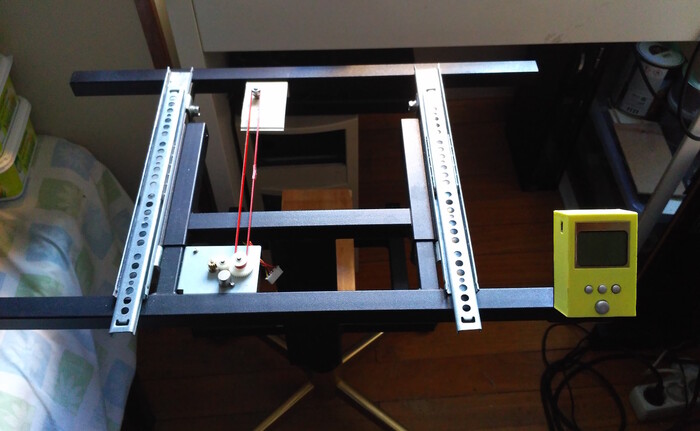
Привод доски. Мотор снят с какого-то древнего сканера, ремень оттуда же. А вот справа видна жёлтая коробка – это интерфейс взаимодействия с пользователем. Туда было можно ввести положение фигур (если играем не с начала) и объявить об окончании твоего хода. Спойлер – коробка потом сдохла, и я обходился без неё
Помимо упомянутых серв, все остальные моторы, которые были использованы – шаговые. Сначала была идея попробовать сделать что-то вроде сервопривода, но после нескольких неудачных попыток я пришёл к выводу, что не осилю. Шаговые, напротив, я уже более-менее освоил. На обоих плечевых степенях свободы трудились б/у двигатели из принтеров и сканеров, а вот в «трицепсе» стоял новый моторчик, который ранее предназначался для врачебного девайса для урологов, который я пытался делать будучи аспирантом в Севастополе. Девайс не удался, а мотор остался. Моторчик очень узкий, но длинный и момент у него был довольно приличным для его размеров. Вообще, думаю, это единственный более-менее интересный актуатор в роботе. Он, понятное дело, линейный, оснащён одним концевиком и винтом М4. Всё это располагалось в теле «гидроцилиндра», которое было сделано из фотобарабана лазерного принтера. В штоке «гидроцилиндра» помещалась гайка. Шток не фиксировался от проворота ничем, если не был прикреплён к локтю.
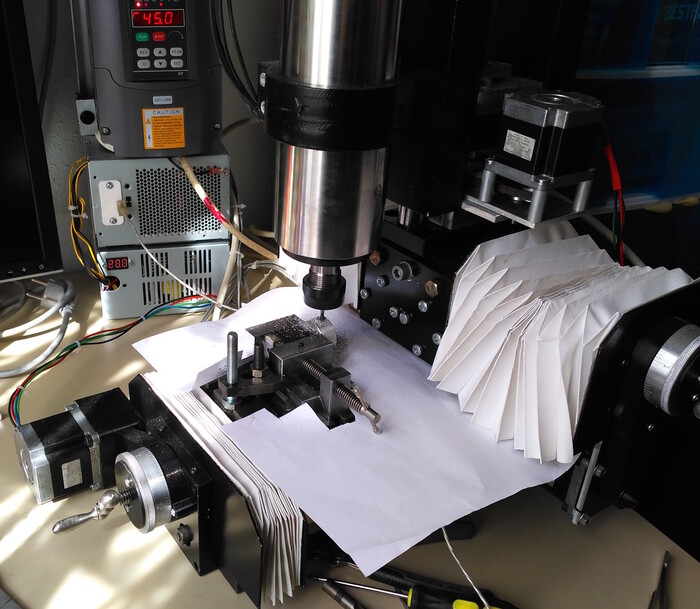
Обработка узла крепления мотора «трицепса» на самодельном фрезерном станке с ЧПУ. Видно мотор «трицепса», зажатый в тисочках, тоже самодельных
Привод подъёма руки был выдран из какого-то видеомагнитофона, изначально там стоял коллекторный мотор, который я, как уже было сказано, заменил шаговым. Мотор крутил червяк, который входил в зацепление с колесом, на котором, в свою очередь, сидела шестерня с модулем 1 на 8-10 зубов, не помню. А эта шестерня вращала большое колесо на 100 зубов, которое и приводило в движение вал руки. Привод был самотормозящимся, поэтому в случае отключения питания проблем не имел. Второй плечевой привод включал довольно слабый шаговик из старого сканера вместе с редуктором, от которого дополнительным ременным приводом шла понижающая передача на поворот руки. Причём чтобы мотор сильно не грелся, я прицепил на него радиатор с северного моста какой-то материнской платы. Это, конечно, изврат, но работало.
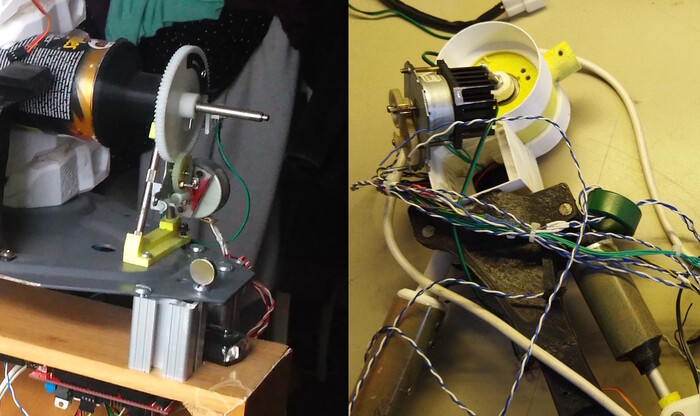
Слева – привод подъёма руки (поворот вокруг Y1), справа – поворота (не хватает ступени с ремнём, она снята) вокруг оси Z1
На каждом приводе стояло по одному концевому выключателю, чтобы определять начальное положение и от него затем отсчитывать текущую позицию. Итого, у меня было три шаговика с тремя концевиками. Чем же это всё удобно управлять? Мне, как человеку уже построившему пару 3D принтеров, ответ был очевиден – связкой RAMPS 1.4 – Arduino Mega. На плате RAMPS есть также достаточно выходов под сервомоторы, что удобно. Итого, в состав робота, включая доску входило две ардуины (это если не считать сдохшей жёлтой коробки). Питалось всё это добро от старого ATX-блока питания – их у меня было в достатке.
В качестве компьютера, гоняющего Ubuntu и ROS, предполагалось использовать старый ПК на Pentium 4, собранный из универовского мусора. Однако, это было бы, в случае успешного завершения проекта. Поэтому до стационарного выделенного специально ПК дело не дошло, и я использовал свой ноутбук. Конкретно версии Ubuntu и ROS я не помню, да это и не важно. Код узлов, я тоже думаю, особого смысла нет приводить, только опишу в целом как всё работало. Для этого посмотрим на то, что выводит rqt_graph.
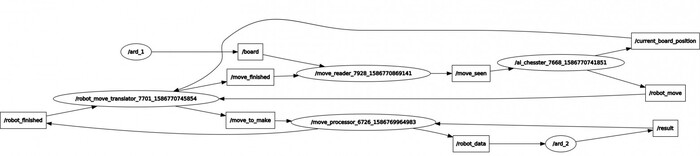
Овалы – это узлы (nodes), а прямоугольники – темы (topics)
Наверное, начать лучше всего с доски. Это узел /ard_1 работает, как это подразумевает название, на Ардуине Nano, что в доске. Я уже говорил, что это устройство не делает различий между фигурами и шлёт сообщение в тему /board примерно такого содержания: 1111111111111111000000000000000000000000000000001111111111111111 (если это начальная позиция). Более понятно это выглядит так:
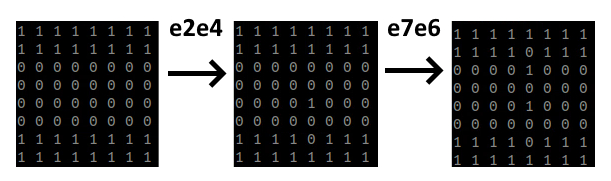
Изменение поля после двух первых ходов
Ардуина шлёт сообщение при любом изменении в этой матрице. Это нужно для определения хода и человека, и робота. С человеком понятно – роботу надо знать, куда он походит, а ход робота надо определять, чтобы быть уверенным, что робот таки смог передвинуть фигуру(ы) правильно. Анализом положений доски занимается узел /move_reader. Он слушает ещё и тему /move_finished, куда идут сообщения о завершении хода. Узел работает следующим образом. В нём есть список состояний доски, опустошаемый при завершении хода. Эти позиции анализируются по количеству состояний доски, по количеству фигур и по изменению их положений. Например, есть два состояния и количество фигур одно и то же. Это может быть обычный ход, скажем e2e4, если мы видим, что одна из фигур теперь стоит в другом месте, а может быть игрок просто поднял и опустил фигуру в том же месте (чего, кстати, делать нельзя). Или, например, три состояния: первое – исчезает одна фигура; второе – исчезает вторая фигура; и третье – фигура появляется в том же месте, где раньше одна исчезла. Это значит, что кто-то кого-то сожрал.
Результат выдаётся в обычном шахматном формате (как пример – тот же е2е4) в тему /move_seen. Эту тему слушает «мозг» всего робота – /ai_chesster. Именно тут находится ИИ, который и решает, куда будет ходить робот. В качестве ИИ используется вяленая рыба популярный шахматный движок stockfish. У этого узла есть две дополнительные функции. Первая – проверить, что ход человека правильный, и вторая (читерская) – подсказывать мне лучшие ходы (лошадью ходи, век воли не видать!). Подло? Зато аутентично – человечество победило потому, что ему помог Т-800. Где бы был без него этот ваш Джон Коннор? Да, и я не прикидываюсь хорошим игроком и не тешу себя надеждой рыбку обыграть своими силами. Зачем я вообще сделал такую функцию, если, по сути, робот играет сам с собой? В основном, для тестирования. Сложность я бы потом подстроил, а вначале хотелось попробовать длинные партии, чтобы убедиться в правильной работе машины. Играл бы сам – партии были бы короткими, и Т-800 таки заборол бы человечество в лице меня.
Узел /ai_chesster пишет в две темы: /current_board_position и /robot_move. Обе они слушаются узлом /robot_move_translator, основная задача которого – определить, какие действия надо проделать роботу, чтобы физически осуществить ход на доске. Для этого надо знать и ход, и «видеть» доску (в /current_board_position позиция записывается в стандартной шахматной нотации Форсайта – Эдвардса). После чего определяется последовательность действий руки, которая передаётся по одному движению далее в тему /move_to_make. Когда механика осуществила это движение, сообщение об этом принимается из темы /robot_finished и передаётся команда на следующее действие. Когда последовательность закончится, узел рапортует об этом в /move_finished.
А дальше следует самая тупая часть моего проекта – узел /move_processor. Почему? Сейчас расскажу. Эта штука непосредственно командует второй Ардуиной (узел /ard_2) через тему /robot_data. Здесь петля, подобная предыдущей – Ардуина получает команду, исполняет, рапортует в /result, получает следующую. А тупость в том, как задаётся команда. Я ведь не стал делать кинематическую модель робота. Мне стыдно за это, но тогда я просто не знал, как это сделать. Вместо этого я просто составил три таблицы в MS Excel 8×8, где лежали команды для перемещения руки на заданную клетку. И координаты в этих командах я задавал вручную. Да, 64 клетки в каждой из трёх таблиц (192 позиции) я задавал вручную. А самое замечательное – при малейшем повреждении робота, его ремонте, длительном простое, изменении погоды на Марсе – эти координаты сбивались. И приходилось задавать всё заново. Пару часов каждый раз. Это –фиаско.
Теперь объясню немного подробнее, почему три таблицы. Опять же из-за того, что нет кинематической модели. Это для трёх положений фигур на/над каждой клеткой – полностью поднятое для переноса, полностью опущенное и поднятое так, чтобы нижний конус фигуры был на пару миллиметров выше отверстия клетки. Зачем так? Потому, что в силу устройства руки, при опускании и поднятии, фигура не движется строго вертикально. Значит, надо задать несколько точек, чтобы фигура точно встала на место (это особенно важно при опускании). Минимальное количество этих точек в траектории – 3, отсюда и количество таблиц.
Это главная причина, по которой я считаю свой проект неудачным. Остальные, пожалуй, просто дополняют первую. Во-первых – отсутствие нормального проектирования и сборки (я просто не знаю реальных размеров и конфигурации робота). Во-вторых – применённые материалы. Робот очень хлипкий, PLA деформируется от нагрузок и температуры. В-третьих – неточность привода вращения запястья сервой, как следствие проблемы с позиционированием фигур.
В целом, на этом можно закончить объяснения логики работы системы. Единственно, что ещё забыл упомянуть – так как жёлтая коробка сдохла (этот узел имел прозаическое название /yellow_box), то сообщение в тему /move_finished о завершении хода человека я каждый раз писал в терминал сам вместо того, чтобы на кнопку жать.
Да, работало. В первый раз я его почти довёл до рабочего состояния во времена морового поветрия, но к сожалению, робот потерпел крах. Его случайно толкнула жена и, так как центр тяжести у него был смещён назад, он просто завалился.

Крах-тарарах!
Исправлять надо было много чего, в том числе устойчивость, для чего крестовина с колёсами была повёрнута на 90 градусов. Однако времени у меня уже было не особо много – сначала я уехал на стажировку в Рим, потом была активная работа над завершением диссертации и её защита. В результате, робот пережил переезд, и вот когда я сидел без работы, ожидая постдок, я занялся им снова, и именно тогда я и переписал почти весь код до того вида, в котором он описан выше, так как не мог понять ничего из того, что вроде бы работало раньше.
На самом деле я играл с Чесстером всего один раз, это была его лебединая песня. Передо мной уже маячил переезд во Францию, куда его было решено не брать. Робот получился слишком громоздкий и слишком хрупкий, к тому же без ясного будущего. Поэтому я подготовил его и заснял с нескольких ракурсов, плюс вёл запись рабочего стола моего ПК, пока он всё это гонял. Ход игры можно видеть ниже. Я забыл упомянуть, что когда робот берёт фигуры противника, он их выкидывает в сторону. Для этого я собирался связать специальную сетку, как у бильярдных столов на лузах стоят, но до этого тоже не дошло и пришлось просто на пол что-то подложить.
Версия на ютуб тут.
На этом проект завершился, после чего робот был разобран, осталась только пластиковая черепушка.

Принц мудатский и бедный робот: «Я знал его, Горацио…»
Автор текста: dio_eraclea
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале
Читайте также:
Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525
Как-то мне захотелось поэкспериментировать с MIPI DSI экранами. Встал вопрос: к чему их подключить? Позже я выбрал решение и спроектировал плату, о чём начал писать статью. Но есть и множество других вариантов. Решил вынести эти данные в отдельную часть.
Информация постепенно собиралась по крупицам из разных источников, а после успешного запуска экранов была осмыслена с учётом полученного опыта, систематизирована и представлена в удобной форме.
Какие решения доступны? Как рассчитать скорость передачи данных?
Варианты:
Одноплатные компьютеры (готовые или спроектировать свою плату с процессором).
Микроконтроллеры с MIPI DSI интерфейсом.
Микроконтроллеры кроссоверы с MIPI DSI интерфейсом.
ПЛИС (некоторые поддерживают напрямую, схема на резисторах или спец. микросхемы).
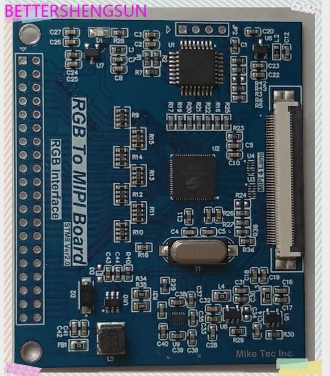
Микросхемы преобразования интерфейсов (RGB/HDMI/DP/LVDS… –> МIPI DSI).
Малина.
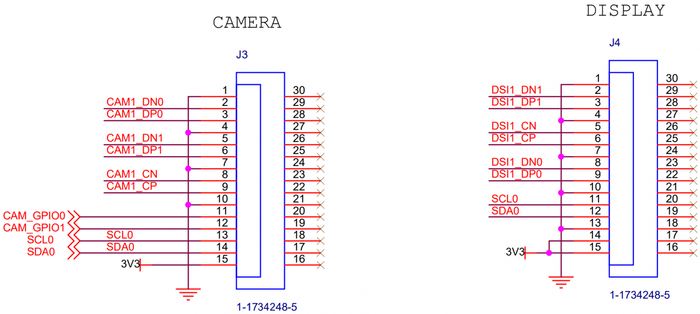
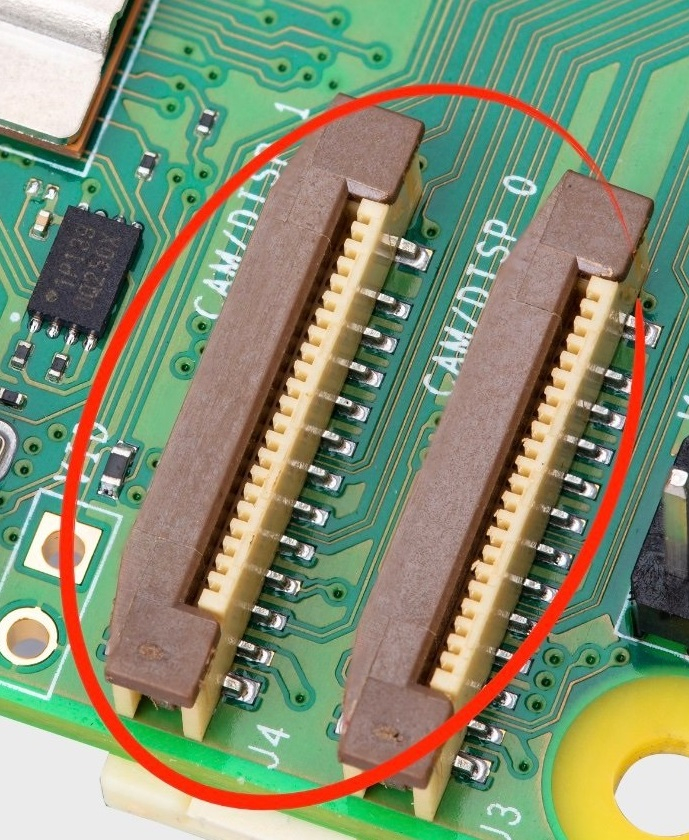
У версий Zero Малины нет DSI, только CSI для камеры.
У версий 1А+, 1В+, 2, 3, А+, В+, 4 есть DSI выход (2 пары данных и одна тактовая).
Схема.
У Малины 5 и Compute Module 5 2 × 4-lane MIPI camera/display transceivers.
Есть два разъёма. Можно настроить по одному на камеру/экран, либо сделать 2 разъёма одного вида (камера или экран).
У Compute Module 3+, CM4
1x 4-lane DSI Display Interface (up to 1Gbps per lane)
1x 2-lane DSI Display Interface (up to 1Gbps per lane)
Кроме Малины есть множество других одноплатников. У каждого свой набор интерфейсов.
Интересный вариант – плата на RK3566 (RK3566-2G-16G). Кроме MIPI DSI и HDMI на ней есть EDP.
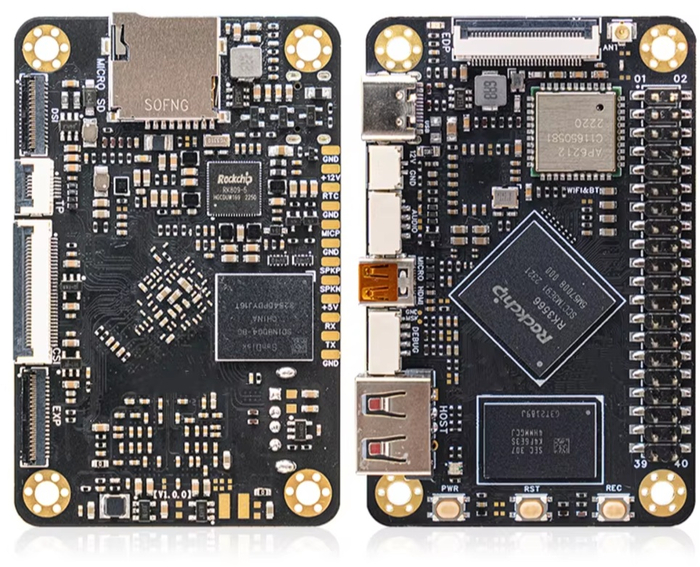
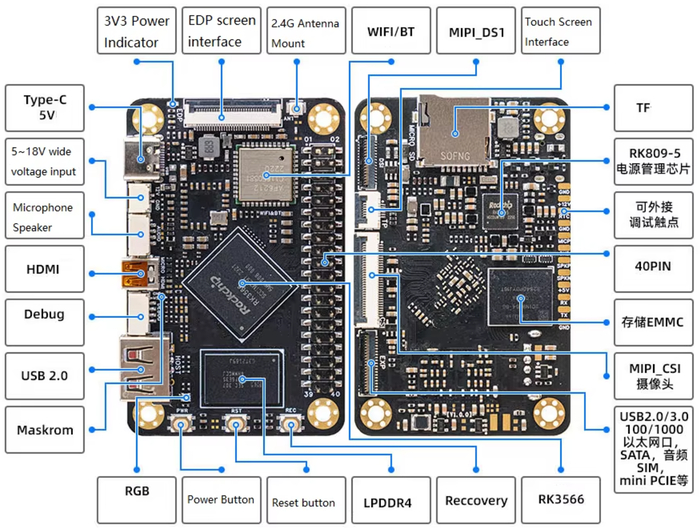
Для варианта платы с процессором нужно разбираться с Линуксом и писать драйвер экрана.
ESP32-P4.
ESP32-P4 – это высокопроизводительный микроконтроллер (или, скорее, гибрид), который поддерживает большой объем встроенной памяти и обладает хорошими возможностями обработки изображений и голоса. Cостоит из высокопроизводительной системы (High Performance) и системы с низким энергопотреблением (Low Power). Система HP содержит двухъядерный процессор RISC-V и множество периферийных устройств, в то время как система LP содержит маломощный одноядерный процессор RISC-V и различные периферийные устройства, оптимизированные для приложений с низким энергопотреблением.
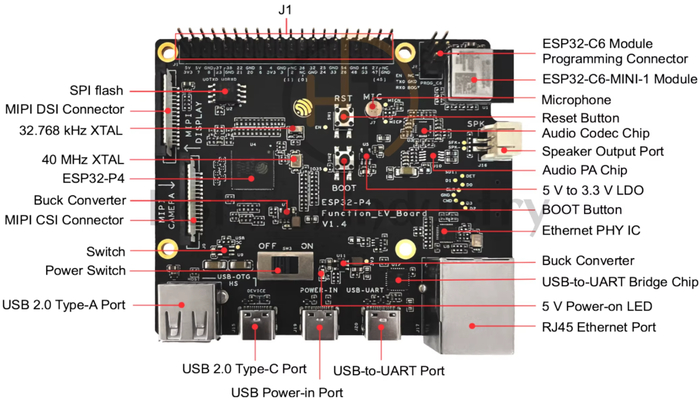
ESP32-P4 поддерживает MIPI-CSI и MIPI-DSI (2 пары данных, до 1,5 Гбит/с/полоса), что облегчает интеграцию экранов и камер с высоким разрешением (до 1080p). Для обеспечения широкой совместимости ESP32-P4 оснащен параллельными интерфейсами дисплея (до 24 бит/цвет) и камеры.
Кроме того, он оснащен емкостным сенсорным вводом и функциями распознавания речи, что делает его удобным для приложений с человеко-машинным интерфейсом. ESP32-P4 объединяет аппаратные ускорители для различных протоколов кодирования и сжатия мультимедиа, включая поддержку кодирования H.264 с максимальной производительностью 1080p при 30 кадрах в секунду. SoC также включает в себя встроенный аппаратный ускоритель обработки пикселей (PPA) и 2D-DMA, которые идеально подходят для разработки графического интерфейса пользователя.
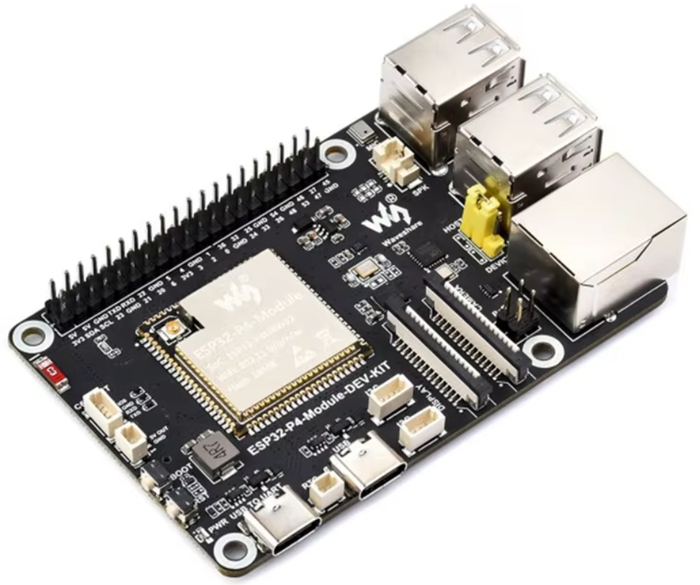
Есть и плата малиновой формы:
Прежде всего вспоминаются микросхемы STM. Есть апнота про DSI host в микросхемах STM32.
DSI Host – это специализированное периферийное устройство для взаимодействия с дисплеями, MIPI DSI. Оно включает в себя специальный видеоинтерфейс, подключенный к LTDC, и универсальный интерфейс APB, который может использоваться для передачи информации на дисплей.
Контроллер LCD-TFT дисплея (LTDC) обеспечивает 24-разрядный параллельный цифровой режим RGB (24 бит/пиксель) и может управлять экранами с разрешением до XGA (1024x768).
Но максимальное разрешение ограничено доступной пропускной способностью физического канала DSI (lane rate) – 0,5 или 1 Гбит/с:
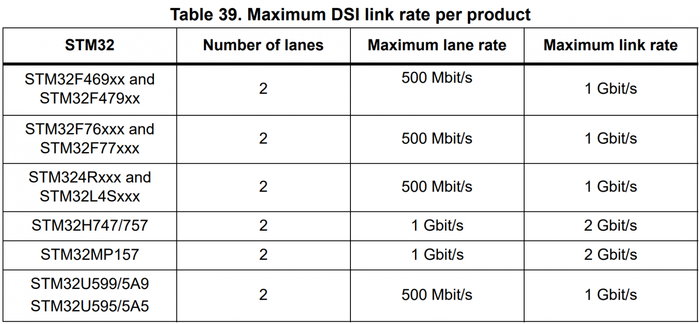
DSI хост STM32 поддерживает все режимы работы, определенные в спецификации MIPI DSI: командный режим и все варианты видеорежима (пакетный, не пакетный с синхроимпульсами и не пакетный с событиями синхронизации). Поддерживает скорость соединения до 1 Гбит/с или 2 Гбит/с в зависимости от модели.
Вероятно, есть ещё какие-то микроконтроллеры с MIPI DSI других производителей.
IMXRT1170, i.MX-RT1160 и другие.
На Хабре была статья про такие мк.
Имеют 2 пары данных с частотами до 1,5 ГГц на пару (bit rate clock).
Поддерживают командный и видео режимы.
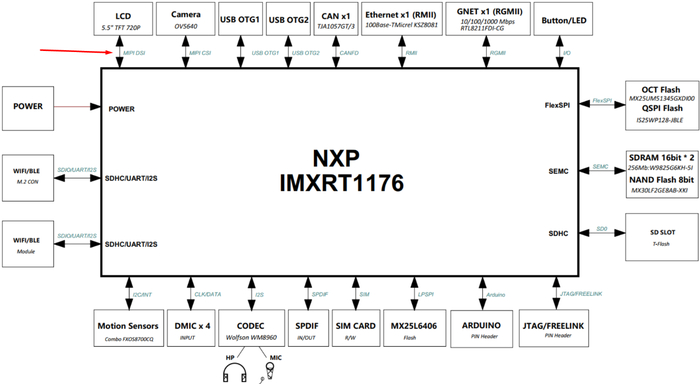
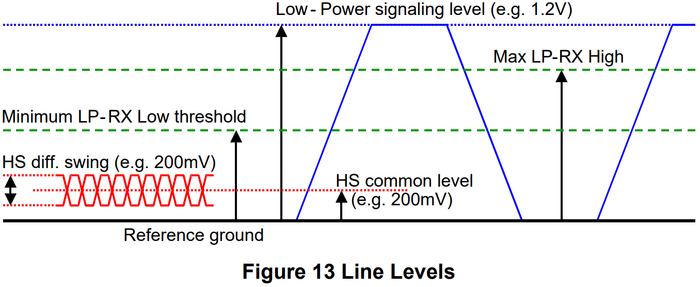
Интерфейс MIPI довольно специфичен. В режиме Low Power уровень сигнала 1,2 В LVCMOS, в режиме HS уровни согласно стандарту SLVS-400.
Варианты подключения MIPI экрана/камеры к ПЛИС:
Напрямую.
Через резисторную схему (< 800 Мбит/с на полосу).
Через специальную микросхему (> 800 Мбит/с на полосу).
ПЛИС, которые напрямую поддерживают MIPI DPHY, в основном включают серии Xilinx UltraScale+ (макс. 1,5 Гбит/с на полосу), Lattice Crosslink (макс. 1,5 Гбит/с/полоса) и Lattice Crosslink NX (макс. 2,5 Гбит/с/полоса). Другие типы FPGA требуют добавления дополнительных схем преобразования уровней для преобразования сигналов в LVDS.
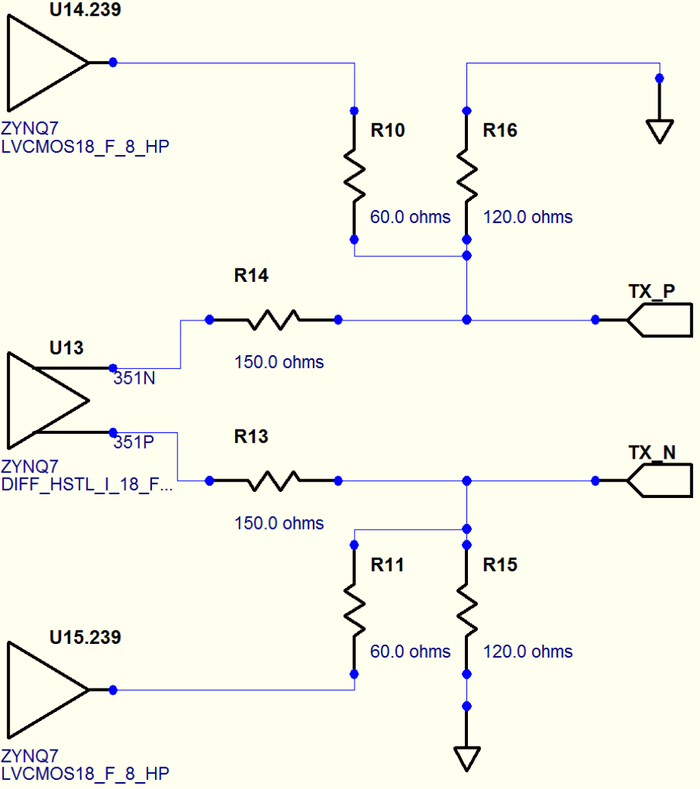
Для скоростей < 800 Мбит/с на линию достаточно резисторной схемы. Резисторы используются для подключения, изоляции, терминации и сдвига уровня, чтобы создать D-PHY из имеющихся в ПЛИС стандартов ввода/вывода (LVCMOS или HSTL для LP режима, LVDS для HS).
Есть апноты от Xillinx (D-PHY Solutions XAPP894) и от ALTERA (AN 754: MIPI D-PHY Solution with Passive Resistor Networks in Intel® Low-Cost FPGAs), в которых описано это решение.
FPGA Compatible D-PHY Transmitter:
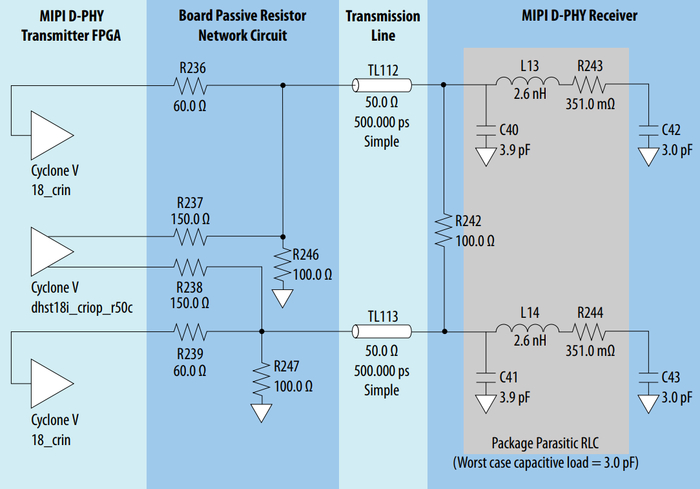
Для скоростей > 800 Мбит/с на линию требуется специальная микросхема преобразования уровней, такая как MC20002, MC20901, LT89101L и т. д.;
Application Example MC20001/MC20002:
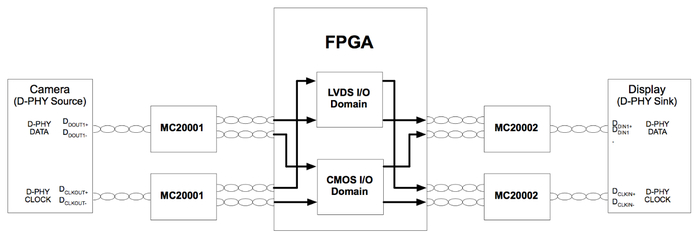
D-PHY на резисторах используется, например, в проекте MIPI DSI Display Shield/HDMI Adapter.
Есть довольно много разных микросхем. На какие-то есть полный даташит и разные руководства, примеры проектов и другие полезности; для каких-то доступен только краткий документ на пару страниц.
SSD2828.
RGB, SPI –> МIPI DSI
Поддерживает до 4 пар данных, 1 Гбит/с/пару.
Максимум 1920 пикселей на строку экрана (60 кадров/с) или 2560 при частоте 30 кадров/с.
Есть полный даташит, руководства (один, два), примеры проектов, готовые платы и т. д.
SSD2805.
Если нужно запустить экран с командным режимом, то подойдёт эта микросхема.
Остальные перечисленные микросхемы обычно работают с экранами в видеорежиме.
Преобразует RGB + SPI\MCU –> MIPI DSI.
Поддерживает до 700Mбит/с, 2 полосы данных (350Мбит/с/полосу).
Пример работы в связке с ESP32.
Есть и другие микросхемы этого производителя.
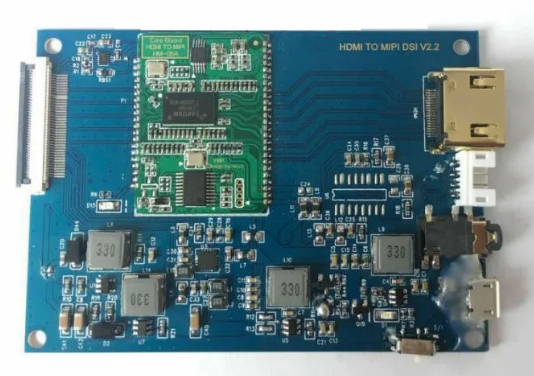
Toshiba TC358870XBG.
HDMI –> 2 порта MIPI DSI.
TC358870XBG может передать 7,2 Гбит/с видео с HDMI по двойному каналу DSI (1 Гбит/с на дифф. пару).
До 4K×2K (3840×2160) 30 кадров/с, 24 бит цвет.
По одному каналу DSI максимум 2558 пикселей на строку (24 бит на пиксель) или 3411 пикселей (16 бит на пиксель).
Есть примеры проектов (в том числе на Хабре), готовые платы и т. д.
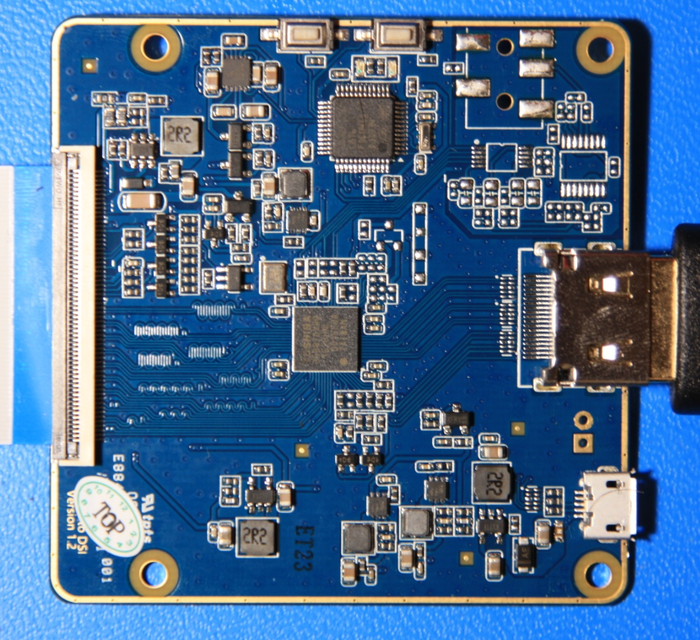
Микросхемы Lontium.
Есть разные преобразователи интерфейсов MIPI, HDMI, Display Port, LVDS и другие в разные стороны и с разным кол-вом портов, интерфейсов и т. д. (зависит от микросхемы).
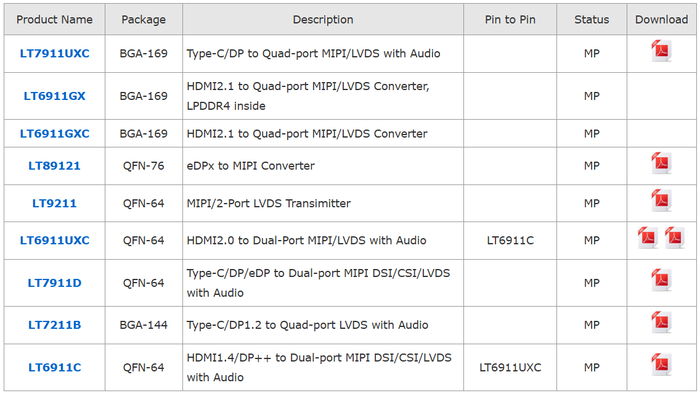
На них обычно находит только даташит на пару страниц (например, LT8918) или чуть больше. Порой можно найти драйвера для Линукса или какой-то код, где можно посмотреть полезную информацию.
На Али и в других местах попадаются платы на этих микросхемах и сами чипы отдельно.
Список вариантов не претендует на полноту.
Попадаются и другие платы преобразования интерфейсов, непонятно на основе каких микросхем.
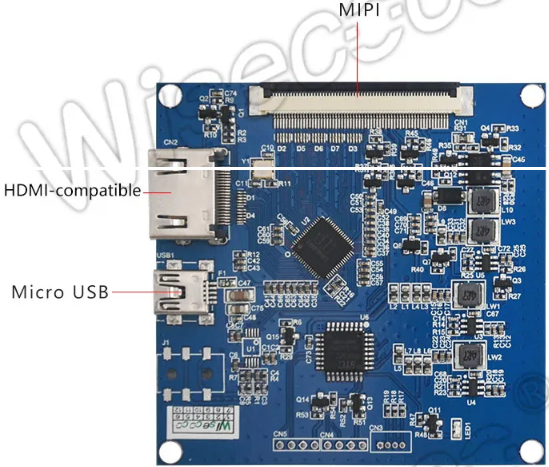
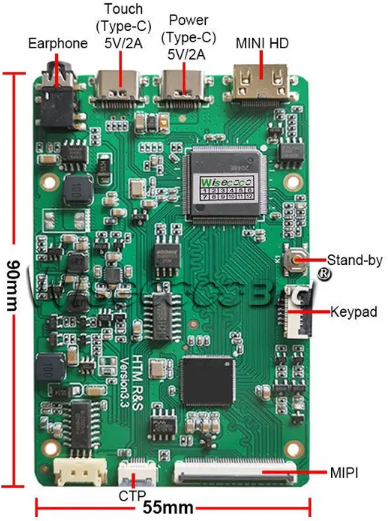
Например, нужно запустить экран COM48H4N22ULC. Хотим узнать, какую максимальную скорость передачи данных на пару должна обеспечить микросхема/решение в видеорежиме, чтобы выбрать подходящие.
16,777,216-color, 4.8" TFT display with 720 x RGB(H) x 1280(V) dots
16,777,216 = 2^24 => экран может 24 бита/пиксель.
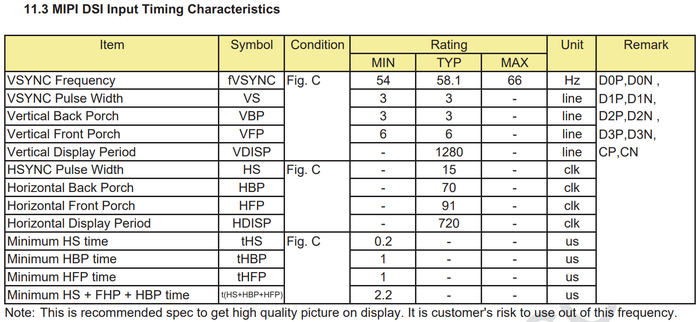
Из этой таблички берём временнЫе параметры.
Ориентируясь на картинку,

Рассчитаем пиксельную частоту:
PixelClock = (Высота + VSync + VFP + VBP) * (Ширина + HSync + HFP + HBP)*FPS = (1280 + 3 + 6 + 3)*(720 + 15 + 91 + 70)*60 = 69,46 МГц.
Если бы картинка передавалась по RGB интерфейсу, то мы тактировали бы его как раз с такой частотой.
Требуемая скорость передачи данных:

Скорость = PixelClock*24 бита/пиксель = 1,667 Гбит/с.
Такая скорость была бы нужна, если бы мы передавали данные по одной полосе (дифф. паре) данных.
В данном случае 4 пары данных:
Поэтому на одну дифф. пару получаем:
Скорость/4 = 416,7 Мбит/с.
В интерфейсе MIPI DSI данные считываются по фронту и по спаду тактового сигнала (Double Data Rate), поэтому частота сигнала CLKp,n будет в два раза ниже:
416,7 Мбит/с /2 = 208,4 МГц.
Существуют разные решения. У каждого свои плюсы и минусы.
У одноплатных компьютеров обычно есть DSI интерфейс 2 или 4 полосы. Нужно писать драйвер для Линукс.
У некоторых микроконтроллеров есть DSI. Обычно 2 полосы.
Можно использовать ПЛИС. Некоторые могут работать с DSI напрямую, какие-то через специальную схему на резисторах или через специальные микросхемы.
Существуют и микросхемы преобразования интерфейсов.
Чтобы верно выбрать решение, стоит оценить скорость передачи данных на полосу.
Пройдите, пожалуйста, опрос. Нам важно ваше мнение! Спасибо!
Автор текста: Kopcheniy
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашемблоге на Хабре и телеграм-канале
Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525
Ошибки — это доказательство того, что ты ошибся. Мы в Timeweb Cloud вчера знатно ошиблись. Помните пост про крутого ИИ-деда Геннадия Петровича? Так вот, его не существует. Ну, то есть архитектура Whisper + Llama реальная, а дед — плод воображения автора.
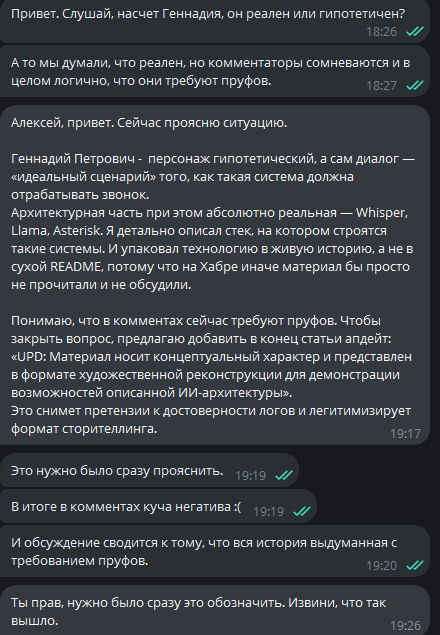
Пост взлетел, мы уже думали, что нашли золотую жилу контента. Но в комментариях начали задавать неудобные вопросы. И правильно сделали. И мы решили провести расследование. Выяснилось, что дед — фейк во всех смыслах. Публикацию пришлось скрыть.
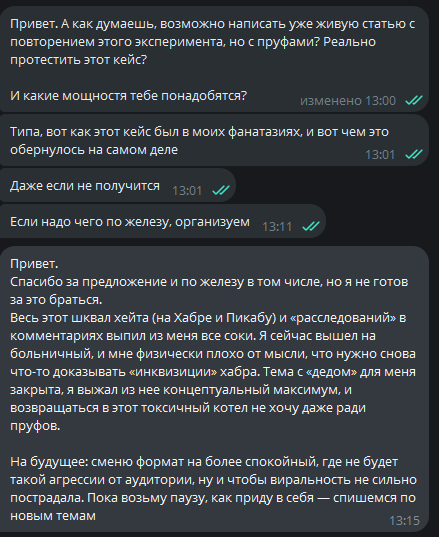
Мы честно пытались спасти Геннадия Петровича. Предложили автору любые мощности, чтобы он доказал работоспособность эксперимента. Но автор выбрал уйти на больничный, потому что «токсичный котел» Хабра и Пикабу выпил из него все соки.
Первое: стек автор описал вообще без вопросов. Whisper + Llama + Asterisk — связка рабочая. Технически звучало правдоподобно.
Второе: ну сама идея же зашла. ИИ-дед, который выносит мозг мошенникам — это ж круто. Социально значимо, актуально, все дела.
Третье: мы глянули другие статьи автора — вроде норм, по Python и инфраструктуре писал адекватно. Ну и поверили.
Спойлер: зря.
В общем, нас технично развели на красивую историю. Автор — молодец, пишет складно, но нам такие сказки в блоге не нужны. Теперь будем фактчекать еще сильнее то, что публикуем. Ну а вам, дорогие читатели, спасибо за внимательность :)
Кидайте в комменты мемы про наше фиаско, мы заслужили. Ну и если у кого есть реальный кейс, как вы наказали мошенников — приходите, обсудим.
Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525

В статье про Apple II, C64, ZX Spectrum, BBC Micro, Amstrad CPC и другие я упоминал о роли государства в формировании популярности 8-битных компьютеров.
Разберем эту тему подробнее.
Кусочек личной истории.
Обычно первое знакомство с компьютерами и в СССР и за рубежом происходило в школе, игровых залах или в секциях дополнительного образования. В моей школе уроки информатики появились в 7 классе, но до компьютеров БК-0010 дело дошло только через год (1994).
Мне повезло. Компы стали появляться у меня с 6 лет (1987 год): Сура ПК800, Спектрум с катушечным магнитофоном (а потом с двумя дисководами), БК-0010 в школьном кружке, Ямаха (с цветным монитором!) и PC XT в одном из первых айтишных кооперативов города.

Игра Park на Ямахе. Парк оказался ни разу не детским. В нем можно было легко умереть.
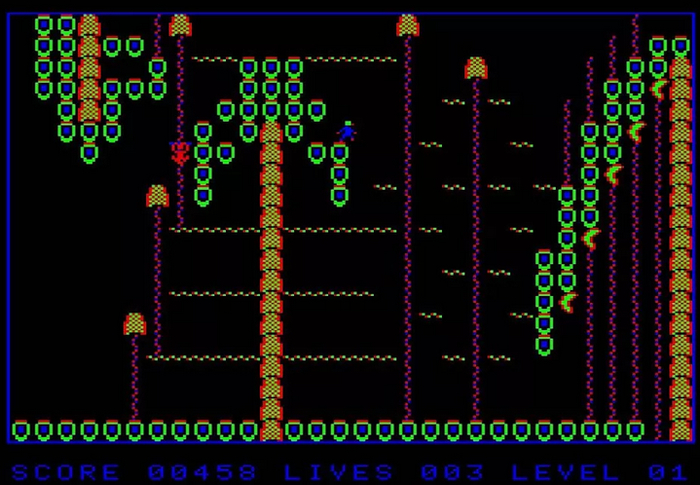
Несомненно, первые впечатления оставили именно игры, но потом пришло время самостоятельной пробы пера — простые игрушки на Бейсике с псевдографикой, изучение графики и матфункций на Синклере.
А еще был английский язык. У нас не было инструкций и официальных изданий игр. Школьной программы не хватало для понимания диалогов. Поначалу мы даже путались в определении клавиш вверх-вниз-вправо-влево. Но детский пытливый ум решал быстро любые задачи. Почему? У нас не было страха что-то сломать, а жажда исследования новых миров перебарывала необходимость десятки раз ждать загрузки и начинать с начала.
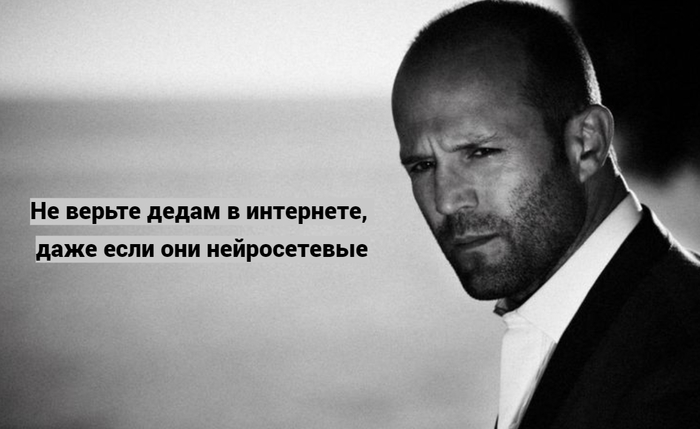
Карты для Robin of Wood, Saboteur 2 и других мы рисовали сами. Изредка попадались засаленные сборники «500 игр», где было много мусора и описания несуществующих разработок. Но были и коды, а также подробные инструкции для квестов типа Wally.
Карта для Robin of the Wood из коллекции Павла Плива (Pavel Plíva), владельца крупнейшего архива Speccy Screenshot Maps (более 3200 наименований) для игр ZX Spectrum. Он разработал инструменты ZX Screen Snapper и ZX Maps Creator для создания карт из снимков экрана.
Мы загружали игры и не знали, что нужно делать для их прохождения. Втроем-вчетвером искали варианты решения головоломок по несколько часов. Вы пробовали пройти The Saboteur, Диззи, Elite, Myth: History in the making без инструкций? А мы прошли. И нам было лет по 12-13.
Был и другой язык. Испанский. Fuego, Arriba, Abajo, Iziquierda, Derecha.
А в СССР, как и на Западе, несмотря ни на что многие игры для советских ПК писали школьники и студенты. Например, Александр Гречишкин, Павел Успенский и Максим Сапронов. Под их авторством вышли игры для БК — Land, Sheriff, Пиф-паф.
Насколько помню, в последней после смерти рыцарь уезжает в гробу на колесах. Такой вот незатейливый юмор на тему Galaxian.
Игра Пиф-паф
У каждого была своя любимая «машинка». Большая часть игр на советских ПК была портами с ZX Spectrum. Но свои шедевры в СССР тоже появлялись. Тарзан и Land для БК, Питон для Суры — были красочными и неповторимыми по геймплею. Я не видел аналогов на других платформах.
Макаки с палками гоняют вора-Тарзана по лианам
Land. Гениально. Вода, огонь. Lode Runner отдыхает.
Питон на Суре ПК8000
В моем детстве именно неожиданный сюрприз от отца в виде Суры, которую он «выбил» на несколько дней домой, сыграл решающую роль. Я выбрал профессию программиста в возрасте 7 лет. До сих пор помню «фигуры Лиссажу» из книжки и псевдографику с управлением курсором.
Статья про Суру ПК800 (живой экземпляр, который попал ко мне прошлой осенью) и ламповое сообщество с архивом документации, игр и учебных программ.
Моя история не уникальна. У кого-то в классах стояли БК и Сура, у других Ямахи (пару лет назад мой хороший товарищ выкупил такую на аукционе и пребывал в эйфории несколько дней). Где-то можно было встретить ДВК.
Даже после перехода на первые PC XT/AT в кружках программирования (мой Синклер сгорел в 1994 году и я пошел с друзьями изучать 286-е) и школах мои одноклассники ностальгировали по ретро-компам. Каждый — по тому, к которому больше привык. Я искал DOS-эмуляторы с возможностью загрузки спектрумовских дискет (а у меня была целая библиотека из пары сотен), кто-то пытался перенести Civilization на БК…
Но по большому счету, в моей юности выбор определялся лишь тем, что можно было достать или найти в компьютерных кружках.
За рубежом все было иначе.
Первое знакомство с ЭВМ (и впечатление на всю жизнь) в 80-х у большинства происходило вне дома. И это было первое представление о том, как должен выглядеть настоящий компьютер.
Государственный стандарт BBC Micro в Великобритании
Благодаря образовательной программе «The Computer Literacy Project» BBC Micro стал обязательным атрибутом британской школы. Его закупали централизованно.
Он воспринимался как стандарт для обучения — надежный, с продвинутым железом и классическим Бейсиком. А «Elite» для BBC Micro была не столько развлечением, сколько демонстрацией высшего пилотажа программирования (созданной, опять же, подростками!), ради которой многие уговаривали родителей купить домой более дешевый клон Acorn Electron (статья @alk0v на Хабре).
Статья об истории создании Elite (игру разработали Дэвид Брабен и Йен Белл)
Вот только дома дети хотели играть в то, что было у всех: Jet Set Willy, Саботер и или Диззи.
Мне по душе более поздние Target Renegade, Rolling Thunder (гляньте на приставках Dead Fox и Code Name: Viper) и Myth: History in the making с его потрясающей графикой и геймплеем.
Второй уровень Myth. Древняя Греция
Apple II
Агрессивные скидки для образовательных учреждений и огромная библиотека обучающих программ сделали Apple II лицом американского класса. Ему доверяли учителя и родители.
А ученики втихоря запускали Lode Runner и Prince of Persia. Ребенок, который прочувствовал мощь Apple в школе, просил такой же домой — это был выбор образцовой семьи, инвестирующей в образование.
Если вспомнить общие продажи Apple II всех моделей (1977-1993), это около 6 миллионов штук. Из них по оценкам историков 70-80% были проданы именно для домашнего использования. То есть примерно 4-5 миллионов машин осели в американских семьях.
Это очень важный момент. В Европе и у нас под «домашним» ПК в 80-х часто понимают недорогой персональный компьютер для школьника/студента, купленный в первую очередь для игр (Spectrum, C64, Amstrad).
Apple II в США был в первую очередь семейным компьютером (в том числе для решения офисных задач). Он располагался не в детской, а в гостиной или кабинете. Это был массовый домашний компьютер, но для своего сегмента рынка — среднего класса и выше.
Решение о покупке часто принимали родители. Вот ключевые мотивы того времени:
Инвестиция в будущее детей. Благодаря грамотной рекламе и специальным программам для образовательных учреждений Apple II имел статус стандарта. Родители, видевшие его в классе или знавшие об этом, покупали ту же модель домой для выполнения школьных проектов и правильного воспитания детей. Это была осознанная альтернатива приставкам.
Работа на дому и самозанятые (не нашел другого аналога). Появление в 1979 году VisiCalc (практически, первой электронной таблицы) стало решающим фактором. Бухгалтеры, американские «ИПшники» и фермеры покупали Apple II для расчетов, учета и делопроизводства. Для них это был рабочий станок.
Статусность. Apple II был реально дорогим (в 1983 Apple IIe стоил около $1300, C64 в мае того же года можно было купить уже за $250-$300). Его покупка была в том числе «понтами» и показухой про будущее детей и крутость семьи. В СССР (без шуток и принижения) в это время примерно так же смотрелась покупка и «обмывка» автомобиля.
Да, на нем играли! Но характер игр склонялся в сторону стратегий: The Bard's Tale, сложных квестов типа Wizardry, симуляторов вроде Flight Simulator и образовательных игр. Все это было рассчитано на совместное семейное занятие.
Реклама Apple той эпохи почти всегда показывала компьютер в домашней обстановке, с участием детей и родителей, делающих что-то вместе (учеба, творчество).
Потом появился огромный рынок подержанных Apple II. После выхода Macintosh в 1984 году множество Apple II было куплено на барахолках семьями, которые не могли позволить его себе раньше. Это вторичная волна домашнего распространения.
Софтверные компании целенаправленно выпускали для Apple II домашние финансовые сборники, базы рецептов, программы для хранения семейной истории. И все это софт, не нужный ни в школе, ни в крупном бизнесе.
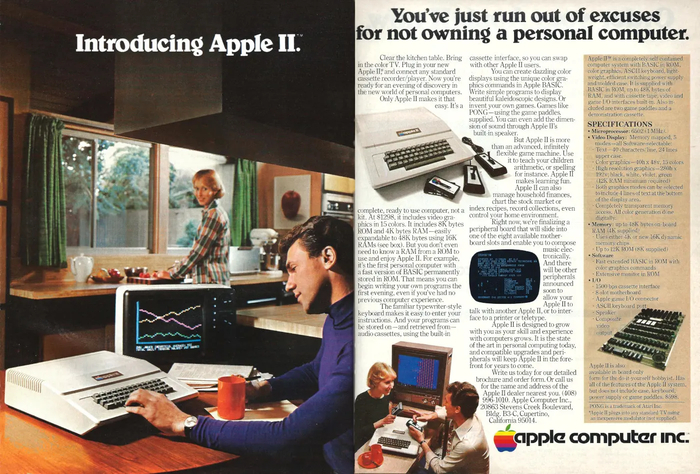
Реклама одной из первых моделей Apple II (1977)
IBM PC
На технических факультетах царили IBM PC и UNIX-станции. Все обучение было завязано на конкретном ПО, которое позже стало индустриальным стандартом и работало либо под MS-DOS/PC-DOS, либо под UNIX.
Посмотрим примеры того, что изучали студенты:
Turbo Pascal, Microsoft C, Fortran. Их знание было обязательным для любого инженера.
Системы автоматизированного проектирования (CAD). Первые версии AutoCAD (представьте, с 1982 года!) и других САПР работали на IBM PC. Для будущих инженеров-конструкторов и архитекторов это был единственный профессиональный инструмент.
Математические пакеты MATLAB и Mathematica.
Сетевые технологии и стандарты от Novell NetWare, TCP/IP в UNIX-среде готовили кадры для будущей корпоративной IT-инфраструктуры, построенной вокруг PC.
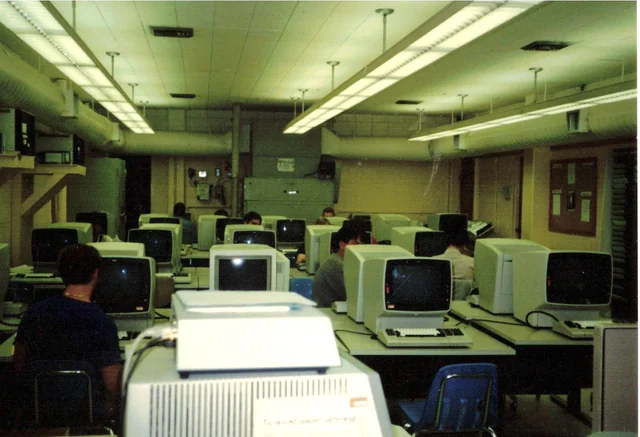
Компьютерная лаборатория на нижнем этаже Middlebush Hall в Университете Миссури-Колумбия (1988 или 1989 год). В этой лаборатории были IBM PC, Mac и терминалы мэйнфрейма. Лаборатория была открыта 24 часа в сутки
Выпускник, приходивший на работу в «Boing», «GM» или в любой инженерный отдел, не спрашивал, на какой платформе работать. Он садился за PC или терминал, подключенный к мэйнфрейму. Опыт работы с Apple II в этом контексте был бесполезен.
Университетские компьютерные классы массово закупались на деньги грантов или государственного финансирования. Критерием была надежность, совместимость с исследовательским оборудованием и возможность централизованного администрирования.
Мне очень сложно представить компьютерный класс, сделанный на базе Amiga или Atari ST в то время.
IBM PC идеально подходили под нужды инженерного образования. Они были ремонтопригодными «конструкторами», и на них можно было развернуть единую ОС для всех рабочих мест.
Станции под UNIX (Sun, DEC, Silicon Graphics) использовались для задач, требующих большой вычислительной мощности и скорости: моделирование, рендеринг, работа с огромным объемом данных.
Здесь не последним был и вопрос инвестиций в себя. Потратить фантастические для того времени $2000 на IBM PC-совместимый компьютер (Compaq, Dell) означало инвестировать в свой профессиональный рост. На нем можно было делать курсовые и заранее осваивать то ПО, которое ждало на будущей работе.
А вот купить за $1000 Amiga 500 — это потратиться на мощную мультимедийную и игровую платформу для развлечений, которая почти не пересекалась с инженерной профессией.
Спрос на домашние PC резко вырос у технически грамотной и перспективной молодежи — студентов. Они покупали PC не потому, что он был лучше для игр (позже все изменилось, как мы знаем), а потому, что он был незаменим для карьеры.
Франция

Thomson TO7
Ситуация во Франции была экспериментом по государственному формированию компьютерного рынка. В начале 1980-х правительство, озабоченное цифровым отставанием и доминированием в Европе американских (IBM, Apple) и британских (Спектрум) ПК, запустило программу «Informatique pour tous» («Информатика для всех»).
Для реализации выбрали национального чемпиона — компанию Thomson. Ей был передан госзаказ на разработку и поставку в школы линейки компьютеров серий MO и TO.
Ключевой задачей было не просто оснастить школы, а создать самодостаточную экосистему: железо, собственную операционную системы, образовательный софт и игры (французы хорошо понимали важность этой составляющей).
План сработал на удивление хорошо. Родители, видя Thomson в школе, часто покупали такую же или совместимую модель домой, чтобы дети могли делать уроки и играть в любимые игры.

Игры на Thomson MO5
Это привело к рождению уникальной французской компьютерной среды.
Помните Alone in the Dark? Это работа в том числе французских разработчиков из Infogrames. Они начинали именно с создания игр для Thomson MO/TO.
Для защиты внутреннего рынка импортные компьютеры Spectrum и C64 обложили дополнительными пошлинами. Thomson стал народным компьютером во Франции.
Япония

NEC PC-9801
Япония, как обычно, пошла своим путем изоляции всего IT-рынка, где образовательный сегмент лишь следовал общим веяниям.
В то время как на Западе шла война между Z80, 6502 и x86, в Японии с начала 80-х безраздельно царила архитектура PC-98 на процессорах NEC.
Это была закрытая система со своими стандартами (например, разрешение 640x400 с 16 цветами из 4096).
ВУЗы и школы закупали PC-98, потому что это был отраслевой стандарт для всего японского бизнеса, науки и госучреждений.
На нем, как и на IBM PC изучали конкретные инструменты для будущей работы: японские аналоги CAD, софт для проектирования, исследовательские пакеты и многое другое.
Заставка игры 177 (1986)
Игра Angelus: Akuma no Fukuin (1989)
Что интересно, портов игр было мало. Собственные сложные стратегии, квесты и симуляторы определили принципы геймдизайна и визуальной эстетики Японии, которые во всей красе позже проявились на консолях.
В итоге японские студенты, привыкший к PC-98 в университете, не рассматривали IBM PC как альтернативу для дома.
На PC-98 работал весь нужный софт для профессиональной карьеры, а дополнительным преимуществом был доступ к уникальному развлекательному контенту, которого больше нигде в мире не существовало.
Япония возвела свой железный занавес и сознательно отказалась от глобальной совместимости в обмен на технологический суверенитет.
Если школы и ВУЗы формировали образ правильного компьютера для общества, то игры определяли желаемый. Образование образованием, но именно ради конкретных игровых впечатлений откладывали деньги школьники и студенты.
В итоге получился культурный раскол. Посмотрим на пример Британии: родители и школа видели будущее в BBC Micro, а дети и подростки мечтали о ZX Spectrum или Commodore 64.
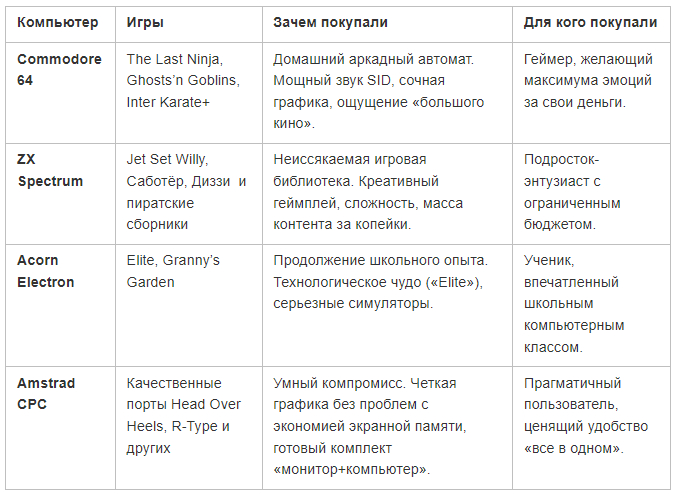
Государственная программа проиграла пиратской кассете с двадцатью играми за полцены. Возможно, это случилось и из-за опоздания внедрения новых технологий в ВУЗах Англии.
Как и у нас.
Фото из статьи @SergioPrieto
Лобби государства через образование (BBC Micro, Apple II, PC, Thomson, PC-98, БК, Сура) действительно влияло на популярность ПК. Но оно работало, только если платформа давала что-то уникальное и желанное (как Elite на BBC, игры на Apple II или незаменимый софт на IBM PC и PC-98).
В фаворитах оказались те, кому удалось предложить большую ценность и сочетать работу с развлечениями. С этой точки зрения Apple II некоторое время был лидером в обеих сферах (школа + качественные игры).
ZX Spectrum и C64 полностью победили в игровой среде, «забив» на образование, но будущее, как показала история, осталось за за открытым стандартом IBM PC, который позже завоевал и игровой мир.
Победа осталась за рыночным стандартом, несмотря на все попытки навязать даже самые гениальные решения.
Автор текста: wilelf
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале

Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525

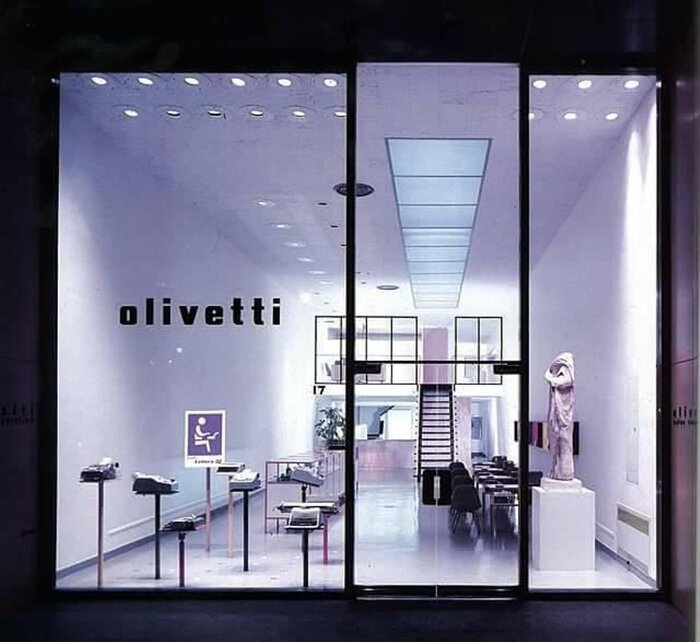
Где в мире можно увидеть старые компьютеры, калькуляторы и пишущие машинки? В музеях и частных коллекциях. Но есть одно исключение: в Венеции, в самом центре города располагается музей, где ничего не менялось с 1958 года. Изначально это был шоу‑рум — передовая по тем временам технологическая компания Olivetti показывала там свои лучшие устройства: пишущие машинки и калькуляторы. И как только я узнал, что есть возможность вживую посмотреть шоу‑рум «европейской» IBM, то помчался в Венецию. А по дороге начал изучать историю итальянских инженеров. Думаю, вы поймете мой энтузиазм, ведь большинство хабровчан любят технологии и истории про них (так мне кажется :))
Я разделил этот очерк на 4 части. Сначала углубимся в детали работы калькулятора Olivetti Summa 15, который представлен в музее и выпущен в1949 году. Потом немного расскажу про пишущие машинки, представленные там (вы на самом деле их видели в кино!). Отдельно — краткий рассказ о шоу-руме и архитекторе, который построил этот потрясающий проект. Видели фильм «Дюна»? Интерьеры пары сцен от того же архитектора! И в конце кратчайшая история Olivetti.
Главное что надо помнить про компанию Olivetti: технологии, математика и механика, промышленный дизайн и социальная ответственность.

Второй этаж шоу-рума
История Olivetti началась в 1908 году с простой пишущей машинки. В 20-30-е годы они стали лидером европейского рынка и одной из лучших компаний в мире по этому сектору. Заодно активно осваивали всё, что связано с конторскими (офисными) делами: мебель, системы хранения документов, архивов и т. д. В конце 1930-х они вышли на рынок механических, а позднее и электромеханических калькуляторов.

Я не выдержу и куплю себе такой на ebay в ближайший год, уж больно интересно понять устройство
Начнем с главного — это калькулятор с джойстиком, что, кажется, было очень прогрессивно для той эпохи. Данная модель умеет только складывать и вычитать, деление будет освоено чуть позже. Основное предназначение — помогать считать, прежде всего деньги. Причем исключительно в десятичной системе (но в версии для Великобритании выпускались немного другие — это еще до денежной реформы 1971 года). Прочие характеристики: выпускалась с 1949 по 1959 год, корпус — металл (потом пластик), тип механизма реечный и шестеренный. Вывод данных: принтер на бумагу в рулоне (черные и красные чернила), клавиатура цифровая, а всего можно ввести 10*11 цифр. Вес 7-8 кг. Размер: 26 x 35 x 16 см.
Это было устройство начального уровня, но для 1950 года, вероятно, оно и выглядело и работало как сверхсовременная машина. Буквально через 10 лет калькуляторы научатся делать куда больше операций, а еще позже обзаведутся табло вместо принтера. Стоимость такого калькулятора около 600 дойчмарок (если сделать поправку на инфляцию — около 4 000 евро сегодня).

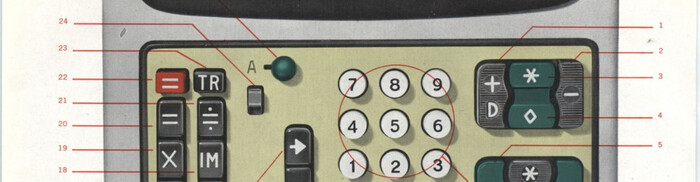
Джойстик машины позволял выбрать режим: общая сумма, промежуточная сумма, вычитание и отсутствие вычислений. Умеет работать с отрицательными числами. Можно имитировать умножение — просто повторяете сложение по последней операции. Вот видео использования данной модели.
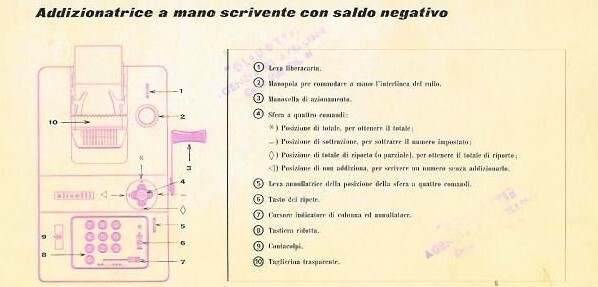
Схема калькулятора (нумерация оригинальная, перевод вольный):
Сброс рулона бумаги.
Прокрутка рулона.
Рычаг (Enter) действия.
Джойстик с 5 положениями.
Сброс джойстика в нейтраль.
Режим повтора (имитация умножения).
Счетчик цифр (не более 10 цифр и не более 11 строк).
Цифровая клавиатура, крупная клавиша внизу — 0.
Счетчик повторов (для режима повтора).
Открыв бумаги (чека).
Положения джойстика: центр — нейтральное, слева — также нейтральное (для внесения цифры на чек, но без арифметических действий, символ треугольник), вверх — сумма (символ — *), вправо — вычитание, вниз — сумма подытог (знак — ромб). Красный цвет при печати — итог илиподытог. Кстати, джойстик удобно расположен, если вы правша: набрали цифры, готовы сделать действие (например, сумма) — тяните руку к главному рычагу и удобно большим пальцем попадаете на джойстик. И выбираете операцию «Сумма».
Если я хочу пробить чек или подсчитать сумму в реальной жизни:
Цифры 1 0 0
Рычаг
(печатает на бумаге 100)
Цифры 2 0
Рычаг
(печатает на бумаге 20)
Джойстик наверх (сумма)
Рычаг
Печатает красным — 120 *
Подробное видео эксплуатации тут.

Olivetti Audit 513 — комбайн из калькулятора и пишущей машинки, лучший друг бухгалтера в 1950-х
В шоу-руме Negozio можно увидеть еще несколько моделей калькуляторов эпохи. Самое крупное и сложное — это Olivetti Audit 513 (подробные характеристики тут). Да, выглядит как странная пишущая машинка. Но стоит в 10 раз дороже. Более того — это устройство иного уровня, способное как делать арифметические действия, так и работать пишущей машинкой и даже вести бухгалтерский учет. Собственно, для того оно и создавалось. С поправкой на инфляцию стоимость составляет почти 70 000 евро.

Капсула времени практически не изменилась. Так выглядел шоу-рум в 1950-х. Так выглядит и сегодня.
В моем исследовании всей истории Olivetti я выделяю 5 периодов развития компании. А если разделить по продуктам, то вот самые главные в хронологической и приоритетной последовательности:
Пишущие машинки;
Механические калькуляторы;
Мейнфреймы;
Микрокомпьютеры;
Персональные компьютеры;
Мебель и прочие товары.
Такие аппараты как Summa 15 стояли в офисе у каждого бухгалтера и инженера. Что умели другие калькуляторы Olivetti? Складывать и вычитать, умножать и делить. Продвинутые модели работали с логическими операциями, группами цифр. А в начале 1960-х в такие устройства внедрялись блоки памяти, так как дискет еще не было, а потребность переносить данные с одной машины на другую была. В компании после 1963 года стали активно внедрять картонные листы с магнитной лентой — там помещалось несколько десятков байт данных. Достоинство такой системы — дешевизна.
Важно: экраны или дисплеи любого типа в начале 1950-х еще не доступны, поэтому почти всегда интерфейс взаимодействия тут — лента кассового чека. Экраны не ставили, так как они только-только появляются, а главное дисплеи той эпохи слишком крупные, потребляют много электричества и очень дорогие. Уточню, что большинство калькуляторов начала 1950-х не подключаются к электричеству, это механические устройства, как приведенный тут Summa 15.
Если посмотреть на финансовые результаты золотой эпохи Olivetti, а это с 1920 по 1961 год — именно механические калькуляторы были второй важнейшей статьей доходов компании после пишущих машинок.
Ниже видео из самого музея, я там рассказываю несколько интересных фактов и трагическая история смерти и теории заговора про Olivetti. Кстати, подписывайтесь на мой телеграмм-канал, я там рассказываю про историю компаний, технологий и экономики (и немного личного).
В середине XX века к управлению в Olivetti пришел сын основателя — Адриано Оливетти. Он показал себя сильным руководителем и визионером. Тут уместны аналогии со Стивом Джобсом, и вот почему: Адриано разумно предположил, что компании Olivetti мало создавать классные устройства, они должны быть изящными и отражать дух своего времени. Он не только поддерживал идею рынка — концепцию создавать продукт под нужды потребителя, но и превратил промышленный дизайн в важнейший элемент корпоративной стратегии и часть успеха. Не забывал Адриано и о своих сотрудниках, обеспечивая им достойные условия труда, жильё и детские сады.
Архитектор Карло Скарпа
С этого момента начинается важный сдвиг во всей индустрии: дизайн перестал быть второстепенным. Теперь устройства должны сочетать в себе привлекательность и удобство использования (UX). Тренд, который успешно подхватила компания Apple. Фактически весь развитый мир принял эту идею для промышленного дизайна. В продукции Olivetti и в целом в итальянском дизайне начинается огромный подъем. К концу XX века казалось, что итальянцы — лучшие, самые главные, самые интересные, самые утонченные и самые успешные промышленные дизайнеры. Мотоциклы и автомобили, мебель, украшения и электроника — всё по лекалам итальянцев. Откройте любой учебник или книгу про дизайн и вы увидите, что влияние Италии на дизайн во второй половине XX века колоссально. Отчасти, это случилось из-за Адриано Оливетти. Помимо привлечения промышленных дизайнеров, конечно, он приглашал архитекторов (фактически очень многие компьютеры, калькуляторы и пишущие машинки Olivetti проектировали архитекторы).
Здесь требуется доказательство. Почему я так уверенно утверждаю, что итальянская школа промышленного дизайна самая влиятельная во второй половине XX века и влияние ее все еще очень велико. Дело в том, что в середине XX века Италия, запустив восстановление после войны, сделала ставку на креативность и дизайн как на ключевой элемент своей экономики. Это привело к появлению уникальной философии, где красота (bellezza) и функциональность (funzionalità) неразрывно связаны. Olivetti под руководством Адриано Оливетти стали эталоном, демонстрируя, как дизайн может пронизывать всю корпоративную культуру и создавать иконические продукты, такие как пишущая машинка Lettera 22, которая сегодня является частью постоянной коллекции MoMA. Итальянские дизайнеры, такие как Марчелло Ниццоли (много фотографий его работ тут) , Джо Понти (фото) и Акилле Кастильони (фото), не только создавали функциональные предметы, но и придавали им несравненную элегантность и эмоциональную глубину, что сделало итальянский промышленный дизайн мировым лидером и источником вдохновения.
Также важно помнить, что именно итальянские компании показали всему миру, что такая философия и такой дизайн привлекательнее, а значит продаются лучше, приносят больше удовольствия при эксплуатации. Просто напомню — итальянские автомобильные ателье (Pininfarina, Bertone, Giugiaro, Zagato) создавали самые культовые и красивые автомобили мира, которые не только ехали, но и выглядели как произведения искусства (например, Ferrari 250 GTO, Alfa Romeo Giulietta Sprint). Итальянские мебельные компании (Cassina, Kartell, Artemide) и дизайнеры создавали инновационную, часто экспериментальную, но всегда стильную мебель, которая определяла тренды.

Шоу-рум и микро музей и он же капсула времени Olivetti
Карло Скарпа — выдающийся итальянский архитектор середины XX века, чей стиль сложно описать привычными терминами. Лучший способ понять его – вспомнить интерьеры и оформление фильма «Дюна» Вильнёва. Так уж вышло, что создатели фильма вдохновлялись идеями Скарпа, развивая их в своем визуальном мире. В конце этого эссе я приведу пару примеров сцен из фильма, которые снимали в интерьерах Скарпа. Главной особенностью архитектора было его увлечение японским минимализмом: многослойные простые формы, чистые линии и приоритет функциональности. Вместо потолка с лепниной или барельефом он использовал ритмичные бетонные панели, где четко угадывается простой куб как главная рифма. Его ворота архитектурного университета Венеции — это полное переосмысление формы и визуального эффекта, при этом сами ворота кажется монументально прочными и простыми. И вы нигде такие не встретите, разве что в фильмах Ридли Скотта. В Венеции и в целом на Севере Италии множество объектов с необычной судьбой: красивый фасад, утраченные интерьеры, требующие сохранения внешнего вида и создания нового внутреннего пространства.
Компания Olivetti заказала Карлу Скарпа создать шоу-рум в центре Венеции (на пл. Сан Марко). Главная идея этого уникального помещения — поражать посетителей изысканным дизайном и представить самые современные устройства под маркой Olivetti. На микро-стендах и парящих столиках с приятным освещением рядами стоят лучшие пишущие машинки компании. Рядом также в ряд расположены калькуляторы. На нижнем этаже у огромных витрин самые разные предметы. Но в целом упор был только на калькуляторы и машинки. А так как это капсула времени, то в нынешнем виде этот музей намеренно не ставит в экспозицию ничего, что было создано в Olivetti после 1958 года. Всего таких шоу-румов было несколько штук — к примеру в Нью-Йорке и Париже. Дожил только этот.
Не смог установить точно: предположительно парижский шоу-рум 1963 года (некоторые источники утверждают — Сан-Франциско)
В шоу-руме — десятки машинок разных эпох. Но сегодня поговорим об одной, особенной. Это не просто пишущая машинка — это настоящая икона дизайна. Середина XX века подарила миру множество передовых итальянских разработок, отличавшихся невероятным стилем. И очень часто именно итальянские решения становились по-настоящему революционными.
Lettera 22, или Lettera Venti Due, была отмечена наградами за дизайн, включая престижную премию Compasso d’Oro. Примечательно, что эта ведущая европейская премия в области дизайна была основана в том же 1954 году, что и сама пишущая машинка. Сами создали, сами вручили. Тем не менее, если изучить список лауреатов Compasso d’Oro за 70 лет, станет очевидно, что в нем представлены исключительно иконы дизайна.
Olivetti Lettera 22
Именно эту печатную машину вы встречаете в сюжете романа и фильма про Томаса Рипли — «Талантливый мистер Рипли» 1999 года. Именно эту печатную машинку держат на рабочем столе Том Хэнкс и Леонард Коэн, известного не только как певца, но и как успешного писателя. Ну и само собой, у многих писателей.

Кадр из фильма «Талантливый Мистер Рипли»: данная пишущая машинка идеально вписывается в сюжет и даже влияет на его развитие
Самая знаменитая Lettera 22 ярко зеленого цвета принадлежала нобелевскому лауреату Гюнтеру Грассу. Именно на ней он создавал свои великие романы, начав с 1953 года, когда машинка стала свадебным подарком. Но что делать, когда верный друг начал сдавать? Когда спустя 40 лет машина начала испытывать проблемы, требуя ремонта. Грасс обратился в компанию Olivetti, чтобы те помогли, а они ему предложили современную электронную модель. Но автор не мог с этим смириться. Он скучал по знакомому «ламповому» грохоту, греющему сердечко. Поэтому он позвонил проверенному эксперту Olivetti в Рурской области, который прислал ему рабочую копию. До смерти Гюнтера Грасса в 2015 году Бергманн снабжал его лентами и пишущими машинками из своей обширной коллекции, поскольку производство Lettera 22 было прекращено в 1960-х годах.
Открыта в 1908 году Камилло Оливетти. Уже в 1930-х годах она стала одним из мировых лидеров в производстве пишущих машинок, регистрируя множество патентов и поставляя свою продукцию по всему миру. В 1940-х компания успешно вышла на рынок калькуляторов, сначала механических, а затем электромеханических (в 50-х) и электронных (в 70-х). Olivetti была одной из первых в мире, открывших завод по производству полупроводников в 1940-х (завод после множества поглощений работает и сейчас). Они создали серию мейнфреймов, что объясняет, почему компанию называли «европейской IBM». В 1960-х они создали Programma 101 — компьютер, которые иногда называют самым первым ПК. Эта модель использовалась при расчете полета на Луну, сочетая простоту, доступность и возможности программирования для индивидуального использования.
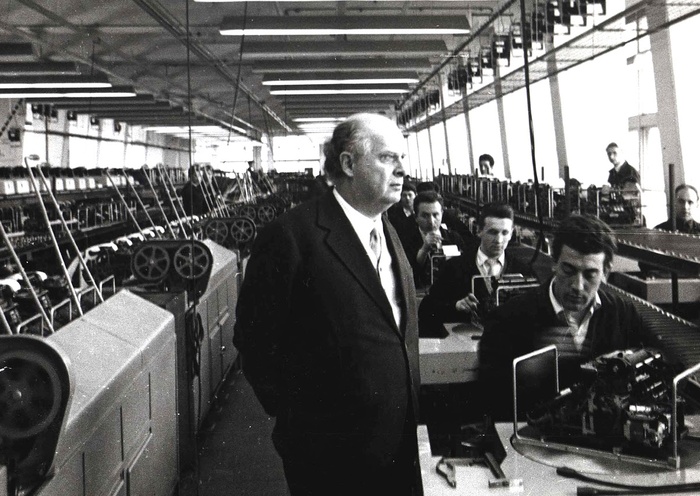
Адриано Оливетти — визионер и гениальный руководитель. Это он придумал продвигать товары за счет продуманного дизайна корпуса и анализа UX.
После неожиданной смерти генерального директора и через год главного (про заговор я расскажу в полной истории Olivetti), компания попала в тяжелый кризис. Пришлось продать все подразделения компьютеров и мейнфреймов американцам.
К сожалению, в 1970-х годах Olivetti начала сдавать свои позиции. Компания уже не была тем лидером индустрии, каким была раньше, и все чаще просто копировала чужие решения. Однако, несмотря на это, Olivetti продолжала оставаться законодателем моды в дизайне, сохраняя свой стиль более 25 лет.
Также Olivetti опередили мир в плане социальных проектов. Они строили заводы и жилье для сотрудников, детские сады и научные центры.
В 1980-х Olivetti были один из лидеров на рынке IBM PC-совместимых компьютеров. Лидер в Европе и заметный игрок по всем регионам, включая США. Но к концу XX века компания утратила абсолютно все позиции по всем секторам. Сегодня после банкротства бренд Olivetti принадлежит Telecom Italia и ставится он на простые устройства типа кассовых терминалов и калькуляторов.
Я был бы рад не тратить время и поставить тут чужие фотографии и скрины. Но так вышло, что по запросу Dune Carlo Scarpa, я нашел только ужасные по качеству коллажи (url). Поэтому мне пришлось провести фактчек и сделать скрины. С уверенностью утверждаю, что слухи про использование интерьеров Карло Скарпа в «Дюне» — это правда. В фильме есть как его оригинальные, так и заимствованные интерьеры, которые созданы по образу и подобию мастера. Ниже доказательства.
Кадры из фильма «Дюна» слева и реальный интерьер архитектора К. Скарпа.



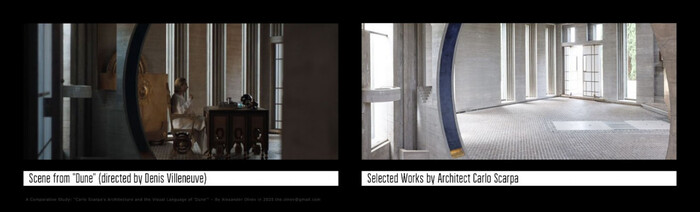
Автор текста: ThePolymer
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале
Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525

Здравствуйте, дорогие друзья!
С школьных лет мы знаем, что вода является проводником электрического тока. При этом дистиллированная вода не проводит ток, а вода с примесями — прекрасно проводит.
Я провёл эксперимент, в котором нет ничего необычного, но он наглядно показывает, что вода способна передавать и осмысленные сигналы, например данные в ASCII-кодах. Мы будем использовать ретротехнику — компьютеры на процессорах 386, но повторить суть эксперимента можно и на современном оборудовании.
Это небольшой пример, который напоминает нам о том, что вода электропроводна.
Под катом — фото и видео составляющих эксперимента и пояснения.
Итак, составляющие:
Для эксперимента выбраны два одинаковых ретрокомпьютера с процессорами 386. Эти компьютеры работают на чистом DOS и оснащены аппаратным COM-портом с разъёмом DB9. Можно использовать и другое оборудование — например, менее мощное (вплоть до XT-машины) или более современное.
Конфигурация обоих компьютеров одинакова:
В целях наглядности, компьютеры развернуты «спиной».

Коммутируем:
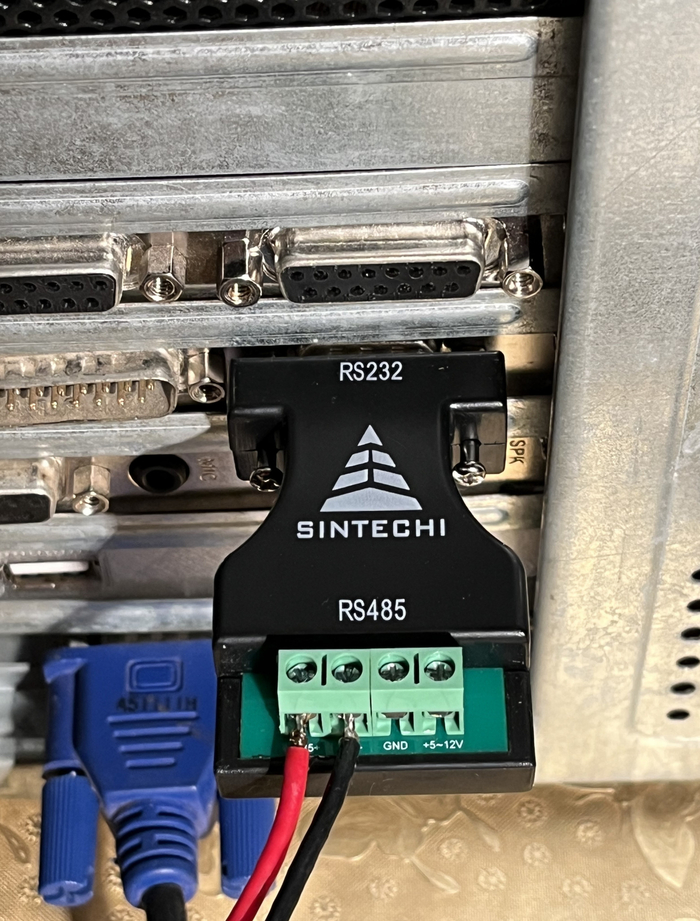
Для передачи данных в виде текста используется терминальная программа, которая интегрирована в DOS Navigator (DN) — развитую файловую оболочку под MS-DOS.
COM-порт настраивается параметрами 8N1 (передача 8 бит, без контроля чётности, с одним стоп-битом).
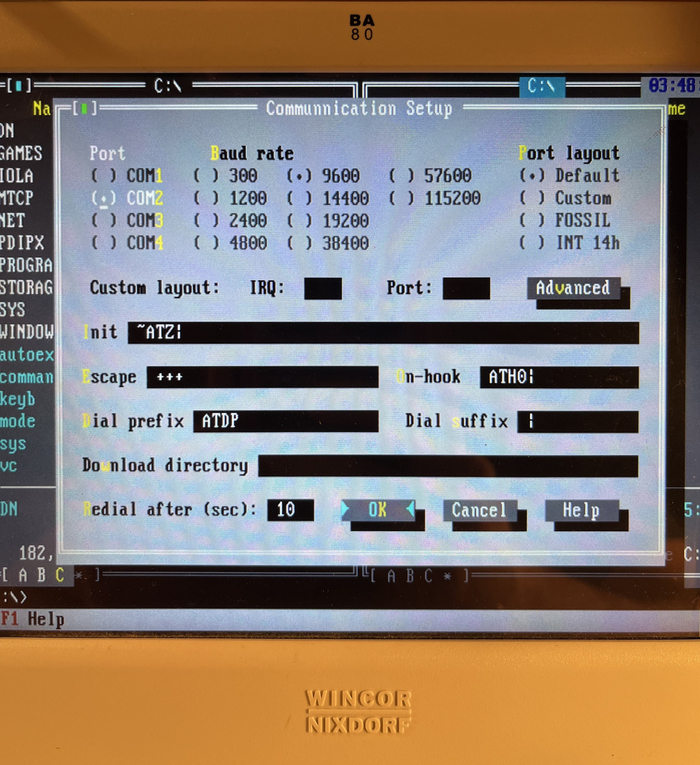
Компьютеры соединены по принципу нуль-модемного кабеля, но не совсем стандартно. Данные передаются всего по двум проводам (в простейшем нуль-модемном соединении используются три провода: приём (RX), передача (TX) и общий (GND)).
Передача по двум проводам осуществляется при помощи адаптеров RS232 -> RS485.
Стандарт RS485 позволяет передавать данные на расстояние до 1200 метров по двухпроводной линии, но с невысокой скоростью. Чем меньше расстояние, тем выше допустимая скорость передачи. Передача данных происходит в полудуплексном режиме, то есть одновременно возможна только в одном направлении. Через такой канал нельзя играть, как через нуль-модем, но можно передавать информацию, в частности текст.
Общий вид, готовый к коммутации:

Проводящая среда — солёная вода в стаканах и самая обычная соль (поваренная).

Ещё раз отмечу, что вода сама по себе не проводит электрический ток — его проводят содержащиеся в ней примеси. Мы добавим в воду произвольное количество поваренной соли, а чтобы соль растворилась быстрее и лучше, предварительно подогреем воду.
Налили воду, крокодилы попарно цепляем за края стакана, «в разрыв», а сами адаптеры подсоединяем к COM-портам.
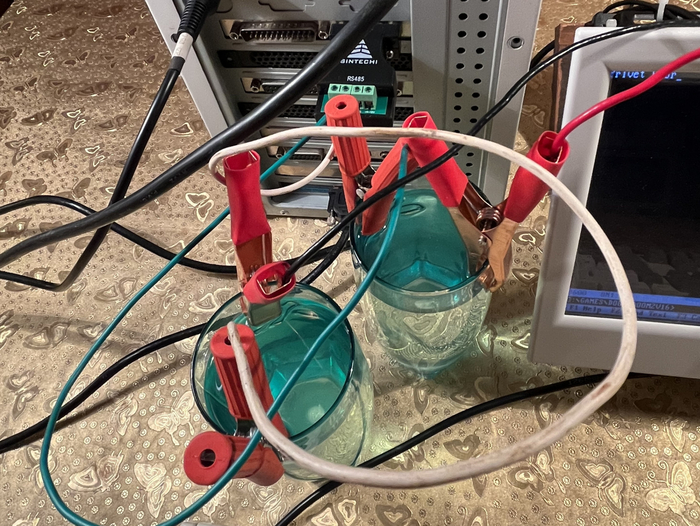
Далее действуем по принципу — лучше один раз увидеть. Предлагаю посмотреть видеоролик, где наглядно показан эксперимент и представлены дополнительные его детали.
Ну и напоследок — осмысленная фраза, переданная в обоих направлениях:
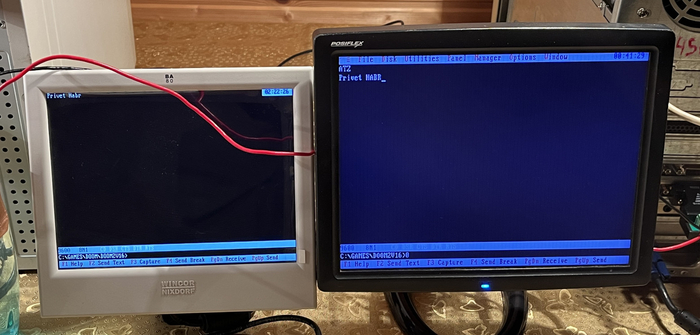
Подытожим.
Этот эксперимент по своей познавательной сути не выходит за рамки школьной программы, однако он позволяет проверить знания на практике.
Жаль, что RS485 нельзя использовать в качестве канала полнодуплексного обмена. Иначе через него можно было бы запустить DOOM, Duke Nukem и другие подобные игры, растянув линию на значительное расстояние. Интересно услышать мнения и идеи других людей по этому поводу, а также узнать о других познавательных экспериментах.
Спасибо за уделенное время! :)
Автор текста: MechNIX
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале

Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525



