
0 просмотренных постов скрыто


Умная, гуманная мышеловка
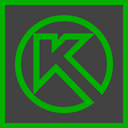
Спроектированная в Компас 3D и распечатанная на 3D принтере гуманная мышеловка (кроме банки и основания конечно). Управляется с Arduino Nano, PIR датчика приближения и сервопривода sg90. Принцип работы следующий:
Вытаскиваем сервопривод из паза, подаём питание. Сервопривод встаёт на своё место, для поддержания первого нижнего упора. Поднимаем подпружиненную дверцу, вставляем сервопривод обратно, дверца встаёт на упор. 15 секунд перед началом работы, Arduino Nano, калибрует датчик PIR, что бы избежать фантомных срабатываний. После того, как датчик откалибруется, мышеловка готова к работе. Мышь залезая внутрь, попадает в зону действия PIR и с задержкой 3 секунды, дверца закрывается. 3 секунды нужны, что бы мышь успела пролезть и ей не прищемить хвост. Через ещё 1 секунду, как захлопнулась дверца, сервопривод фиксирует её, что бы не возможно было открыть. Что бы выпустить мышь, достаточно вытащить банку из кронштейна, открутить и выпустить на свободу.
Показать полностью
3
1




Принцип действия ловушки лифта1
Гуманная ловушка мышеловка на Али, на Яндекс Маркете
Взято из телеги Как это сделано
Реклама: АЛИБАБА КОМ (РУ) ИНН 7703380158

Где тут у вас бесплатный сыр?
Кому интересно, ссылка на такую крысоловку




Мышеловки и капканы
Гуманная ловушка мышеловка на Али, на Яндекс Маркете
Реклама: АЛИБАБА КОМ (РУ) ИНН 7703380158